Inlägget diskuterar en enkel infrarödbaserad närhetssensorkrets som implementeras för att studera fåglar och deras beteende genom att installera kretsen bredvid konstgjorda fågelbon. Idén begärdes av Jan Simberg.
Tekniska specifikationer
Jag hoppas att du har tid att läsa några rader. Först och främst thanx för intressanta scheman! De arbetar också! Vi är tre killar som studar fåglar och vi har cirka 1700 fågelbon att kontrollera. Fågelboet är en liten trälåda med ett hål framför.
Jag är INTE elektriker men jag försöker hitta ett obefintligt sätt att tända en LED utanför boet (bara några tiotals!) När en fågel är inne. LED-lampan måste blinka cirka 5 minuter efter varje upptäckt av rörelse.
Jag kan använda ett uppladdningsbart batteri och en solcell från en trädgårdslampa - det här är OK. Jag hittade din 'Accurate Infrared Motion Detector or Proximity Detector Circuit' på Internet och det kan vara en lösning. Kan jag byta summer till en LED med motstånd?
För det andra hittade jag din indikatorkrets för lågt batteri med endast två transistorer och att a var en hit. Vad är den lägsta spänningen för ett uppladdningsbart batteri 4 gånger 1,2V = 4,8V? Några idéer för att tappa den nuvarande konsumtionen? Vad har 5min-spärren på?
Virvelström- och PIR-detektorer kan fungera men jag tror att de förbrukar ström för mycket. Ultraljudsdetektorer är uteslutna - vilken frekvens hör en fågel?
Äntligen gjorde jag en snabb PCB-layout för din IR-detektor. Pls ta bort om det är för hemskt.
Regs,
Jan Simberg
Designen
Den föreslagna fågeln i boendetektorkretsen kan förstås med följande punkter:
IC LM567 är konfigurerad i sitt standardfaslåsta slingfrekvensdetektorläge.
IR-fotodioden LD274 matas med den inställda frekvensen från IC och denna fotodiod blir sändarenheten.
En annan fotodiod BP104 är placerad parallellt med ovanstående fotodiod så att den kan ta emot de reflekterade IR-strålarna i närvaro av ett hinder (en fågel här) inom det angivna avståndet framför dem.
BP104 blir mottagarens IR-enhet i kretsen och är inställd på att endast svara på de reflekterade strålarna från LD274 och inte på några andra falska invasioner.
Så snart ett hinder upptäcks utlöser och aktiverar BP104 IC LM567 med låg logik vid utgångsstiftet 8.
Ovanstående utlösta låglogik är dock endast aktiv så länge inkräktaren är förinställd i detektionszonen.
För att hålla produktionen upprätthållen under en rimlig tidsperiod introduceras en IC 555 monostabil i kombination med IC LM567.
IC 555 accepterar den låga signalen från pin 8 i LM567 och håller sin pin3 hög under en viss förutbestämd tid även efter att LM567-utgången är avaktiverad på grund av ett eventuellt plötsligt försvinnande av hindret.
Perioden under vilken pin3 i IC 555 förblir PÅ kan ställas in genom att på lämpligt sätt justera värdena på R9 / C5
Transistorn T3 begränsar och hindrar C5 från att laddas tills pin8 i LM567 är avaktiverad på grund av borttagning av hindret.
Ovanstående steg säkerställer att IC 555-utgångsspärren PÅ-tidpunkten initieras först efter att fågeln har kommit in i boet, detta säkerställer också att IC 555-utgången exekverar den förutbestämda tidspärren först efter att pin8 i IC LM567 har blivit inaktiv.
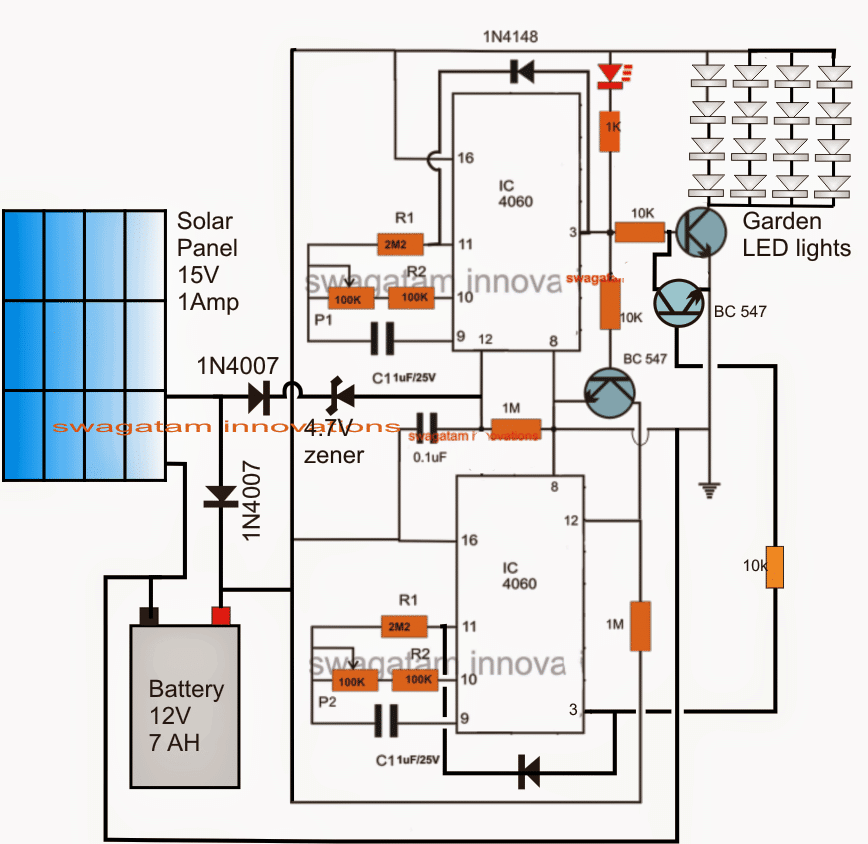
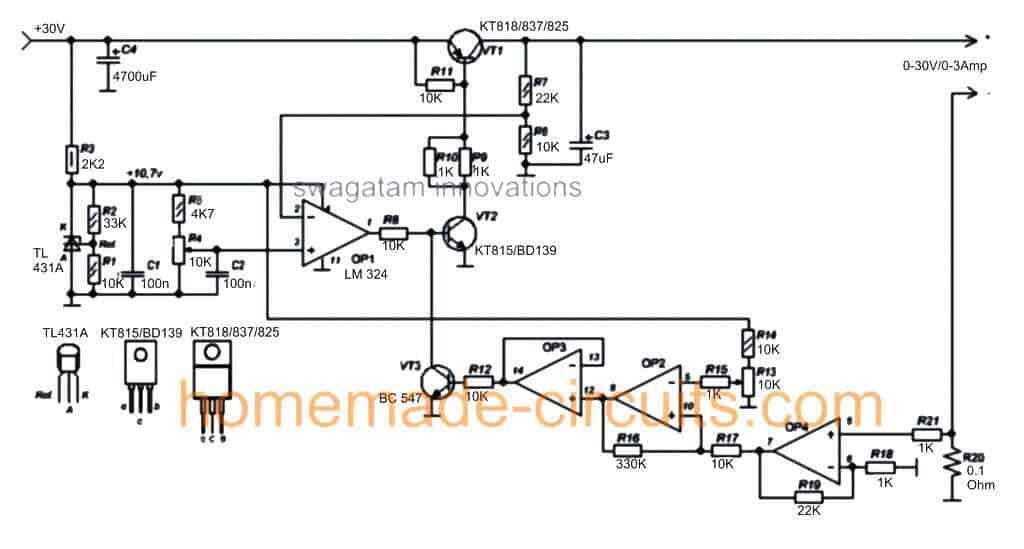
Kretsschema

PCB-designen för ovanstående krets, skickad av Jan:

Tidigare: Ultraviolett (UV) Sanitizer Circuit för desinfektion av hemmaterial Nästa: Hur man ansluter LED-downlight för bil