Servomotorer är fristående mekaniska anordningar som används för att styra maskinerna med stor precision. Dessa finns i många applikationer från leksaker till industriell automatisering. Det finns olika typer av motorer, men servomotorer är speciellt utformade för specifika vinkellägen för att styra maskinerna. Vanligtvis används servomotorn för att styra vinkelrörelsen mellan 0 ° till 180 ° och 0 ° till 90 °. De servomotorns arbetsprincip baserat på PWM ( pulsbreddsmodulering ) pulser.

Servomotor
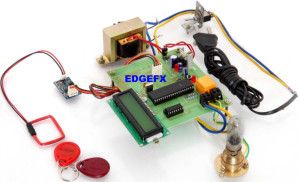
Servomotorgränssnitt med 8051 mikrokontroller
En servomotor är en av de mest använda motorerna för exakt vinkelrörelse. Fördelen med att använda en servomotor är att motorns vinkelposition kan styras utan någon återkopplingsmekanism. Servomotorerna används vanligtvis i kommersiella och industriella applikationer . De används också ofta som i drivsystem som robotar, flygplan etc.

Interfacing Servomotor med 8051 mikrokontroller
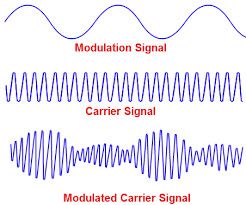
Hobby servomotorns arbetsprincip och manövrering är väldigt enkel, den bestod av tre ledningar där två av dem (svart och rött) använde för att ge ström och den tredje ledningen används för att ge styrsignal. Pulsbreddsmodulerade (PWM) vågor används som styrsignaler och vinkelpositionen bestäms av pulsens bredd vid kontrollingången. I den här artikeln använder vi en servomotor med en rotationsvinkel från 0-180 ° och vinkelpositionen kan styras genom att variera arbetscyklerna mellan 1ms och 2ms.
Här gränsar servomotorn till 8051 mikrokontroller , den svarta ledningen som är ansluten till jordstiftet och motorn får strömmen från den röda ledningen. Styrning av servomotoransluten port0 på 8051 mikrokontroller. 11.0592MHz kristalloscillator används för att ge klockan pulserad till mikrokontrollern och 22pf keramiska kondensatorer som används för att stabilisera driften av kristall. 10KΩ och 10uf kondensator används för att ge ström vid återställning till mikrokontrollern.
Styrning av en servomotor med vinkelrotationer
Servomotorns arbetsprincip beror främst på arbetscykler. Den använder pulsbreddsmodulerade (PWM) vågor som styrsignaler. Rotationsvinkeln bestäms av styrstiftets pulsbredd. Här används servomotorn för rotationsvinkel från 0 till 180 grader. Vi kan styra den exakta vinkelpositionen genom att variera pulsen mellan 1ms och 2ms.

Styrning av en servomotor med vinkelrotationer
Servomotorprogrammering Med vinkelrotationer
#omfatta
Sbit servomotor_pin = P0 ^ 5
Ogiltig fördröjning (osignerad int)
Ogiltig servo_fördröjning (osignerad int)
Ogiltigt huvud ()
{
Servomotor_pin = 0x00
Do
{
// sväng till 0 °
Servomotor_pin = 0x01
Sevo_fördröjning (50)
Servomotor_pin = 0x00
Fördröjning (1000)
// sväng till 90 grader
Servomotor_pin = 0x01
Sevo_fördröjning (82)
Servomotor_pin = 0x00
Fördröjning (1000)
// sväng till 180 grader
Servomotor_pin = 0x01
Sevo_delay (110)
Servomotor_pin = 0x00
Fördröjning (1000)
Medan (1)
}
}
Ogiltig fördröjning (osignerad int a)
{
Osignerad int p
För (p = 0p
}
Ogiltig servo_fördröjning (osignerad int a)
{
Osignerad int p
För (p = 0p
}
Servomotorns arbetsprincip
Servomotorns arbetsprincip beror främst på ”Fleming left hand rule”. I grund och botten är servomotorer anpassade med DC-motorer , en positionssensor, en reduktion av växlar och en elektronisk krets. Likströmsmotorerna drivs från ett batteri och går med hög hastighet och lågt vridmoment. Vi monterade axel och växel anslutna till likströmsmotorer så kan vi öka och minska motorhastigheten gradvis.
Positionssensorn känner av axelns position från dess fasta läge och skickar informationen till styrkretsen. Styrkretsen avkodar signalerna i enlighet därmed från positionssensorn och jämför motorernas faktiska placering med det föredragna läget och reglerar följaktligen DC-motorns rotationsriktning för att få den nödvändiga positionen. Generellt kräver servomotorn 4,8 V till 6 V DC-matning.
Servomotorn styr med seriell port Kommandon
Huvudsyftet med detta projekt är att styra servomotorn med hjälp av en persondator. Det behöver en enda kontrollinje från mikrokontrollern och den seriella ingångsledningen, från persondatorns seriella port för att skicka kommandon till kretsen. Tidkällan tillhandahålls av kristalloscillatorn. Designad servomotorkrets som är gränssnitt mot datorn med hjälp av seriekabeln och nivåförskjutaren och öppnar sedan ”Hyper Terminal” -programvaran på datorn för att välja datorns komport.

Servomotorstyrning med seriella portkommandon
När kommandona skickats från persondatorn (PC) till mikrokontrollern via hyperterminalen med en nivåförskjutare, får mikrokontrollern dessa data och jämför dem med de fördefinierade data och genererar motsvarande signaler för att aktivera motorföraren för att driva den vid önskad hastighet. Många mikrokontrollerprojekt utvecklat baserat på servomotor som balanseringsrobotar, banhelikoptrar och så vidare. Vi kan använda servomotorer för säkerhetsändamål genom att koppla ihop med trådlös kamera eftersom vi kan kontrollera kamera 360-avvikelse.
Självbalanserande robot
Självbalanseringsroboten kan balansera sig själv med hjälp av servomotorerna. Denna robot har monterats med hjälp av strukturella, mekaniska och elektroniska komponenter som producerar synligt obalanserad plattform som är mycket lämpad för att tippa i en inriktning. Hjulen på roboten kan oberoende rotation på två sätt, som drivs av en servomotor. Information om enhetens vinkel relativt marken kommer att erhållas från lutningssensorer på enheten.

Självbalanserande robot
Lutningssensorn kan vara en accelerometer, gyroskopisk sensor eller IR-sensor (för att mäta avstånd till marken). Sensorerna skickar information till styrenheten, som kommer att behandla återkopplingen med en grundläggande proportionell, integrerad, derivat (PID) -algoritm för att generera kompenserande lägesstyrsignaler till servomotorerna för att balansera enheten.
Servomotorapplikationer
- Den används i pressmaskiner för att klippa bitarna i storlek
- Den används i sockerpåfyllningsstationen
- Den används i märkningstillämpningar
- Det används förpackningssystem med slumpmässig tidsfunktion
- Det används Används i flygplan
Fördelar med servomotor
- Om en motor får tung belastning kommer föraren att öka strömmen till motorspolen när den försöker rotera motorn. Huvudsakligen finns det inget villkor för steg.
- Drift med hög hastighet är möjlig med servomotorerna.
Det handlar om servomotorns arbetsprincip och gränssnitt med 8051 mikrokontroller Vidare, för teknisk hjälp angående denna artikel eller elektronikprojekt som är designade med gränssnittsenheter som RTC, OLED, flashminne, anpassad LCD, pekskärmsdisplayer etc. Du kan kontakta oss genom att ge dina kommentarer i kommentarsektionen nedan.