I det här inlägget kommer vi att diskutera grunderna för fyrhjulingskroppsbyggnad med aluminiumrör och bultar, i de senare avsnitten i artikeln kommer vi också att diskutera om en enkel drönarkrets som kan användas för att flyga en liten drönareenhet utan att bero på komplexa mikrokontroller.
En quadcopter är kanske den enklaste flygmaskinen som kräver minsta möjliga aerodynamiska noggrannhet och komplikationer, och därför är det ingen överraskning, det kan vinna en enorm popularitet bland de olika hobbyisterna som framgångsrikt skulle kunna bygga detta ... en maskin som de faktiskt kunde flyga och kontroll efter egen vilja.
Quadcopter Dynamics
Det faktum att en quadcopter-drönare är det enklaste när det gäller tekniskhet och dynamik beror faktiskt på 4 propellrar och en balanserad ramstruktur som gör det möjligt för maskinen att flyga med relativt god jämvikt, även under svåra klimatförhållanden.
Men enkelhet innebär också att systemet kanske inte är lika effektivt som de konventionella flygplan- och helikoptrimodellerna som är invecklade för att uppvisa extrem effektivitet när det gäller hastighet och bränsleförbrukning, och naturligtvis bärförmåga ... alla dessa kan vara i huvudsak saknar ett typiskt fyrkoptersystem.
Icke desto mindre, vad gäller ett hobbyprojekt, blir denna maskin det idealiska valet för de flesta entusiaster som tycker att det är mycket underhållande och spännande att bygga en egen flygande maskin hemma, som i slutändan 'lyssnar' och flyger till vilken riktning som helst användaren föredrar att den flyttar.
För en ny spelare, som kanske är tekniskt inte så informerad, kan även denna enkla maskin vara extremt komplicerad att förstå, helt enkelt för att de flesta av den relaterade informationen som presenteras över de många webbplatserna misslyckas med att diskutera konceptet tydligt och på ett 'språk' som kan passa en lekman.
Den här artikeln har specifikt skrivits för de inte så tekniska människor som är intresserade av att bygga en magnifik flygmaskin men tycker att ämnet är för svårt att smälta.
Varför Quadcopters är så lätta att bygga idag
Har du någonsin undrat varför fyrhjulingar och drönare är så lätta att konstruera i dagens värld och var kanske omöjligt tidigare med el?
Det beror i grunden på utvecklingen och förbättringen av Li-Ion-batterierna. Dessa är extremt effektiva former av batterier som finns idag och erbjuder imponerande effekt / viktförhållande. Tillsammans med detta har uppfinningen av BLDC-motorer och högförädlade permanentmagnetmotorer också bidragit till att göra drönarna lätt att konstruera.
Li-Ion-batteriet kan ge enastående vridmoment på motorerna som blir tillräckligt tillräckligt för att skjuta fyrhjulsenheten till en hög höjd över marken inom några sekunder, och gör det också möjligt att förbli luftburet under lång tid prestanda mycket effektiv och användbar.
Hur Quadcopter flyger
Låt oss nu hoppa på rätt sätt och förstå vilka viktiga saker som krävs för att få en fyrhjuling att flyga framgångsrikt. Här är grunderna för att framgångsrikt få maskinen att flyga smidigt:


1) I grund och botten kräver maskinen en fast och stark kropp, men extremt lätt i vikt. Detta kan tillverkas eller monteras med hjälp av ihåliga fyrkantiga aluminiumsträngsprutningsrör, genom att borra hål på lämpligt sätt och fästa ramen med muttrar och bultar.
2) Strukturen ska vara i form av ett perfekt '+' eller ett perfekt 'x', det gör ingen skillnad så länge vinkeln mellan de 'korsande' rören är 90 grader vardera.

Grundläggande element som behövs för att konstruera en quadcopter kan ses i följande bild:

Delmonteringssimulering
Den grova animerade simuleringen nedan visar hur man monterar ovanstående element tillsammans:

Hur man konstruerar Quadcopter Framework
Aluminiumet för '+' -ramen kan skaffas genom att klippa och dimensionera färdigt strängsprutningsrör i aluminium enligt nedan:

Ramens storlek är relativ och är därför inte avgörande, du kan bygga en bred ram med motorerna monterade vid varandra eller bygga en ganska kompakt ramkonstruktion där motorerna inte är för breda från varandra ... även om det måste säkerställas att propellrar är väl avskilda från varandra för att möjliggöra bättre jämvikt och balans.
3) Ramstrukturen '+' måste vara försedd med en fyrkantig plattform vid den centrala sektionen där ramarmarna möts och korsar varandra. Det kan helt enkelt vara en välpolerad aluminiumplatta som är lämpligt dimensionerad för att bekvämt rymma all nödvändig elektronik och ledningar.
Således är den här centrala plattan eller plattformen i grunden nödvändig för installation och inhysning av elektroniken i systemet som i slutändan skulle vara ansvarig för att styra din quadcopter.
4) När ovanstående ramverk är färdiga måste motorerna fästas över ändarna på tvärstängerna, såsom visas i figurerna ovan.
5) Det är onödigt att säga att allt anpassningsarbete måste göras med största noggrannhet och perfekt anpassning, detta kan kräva att en erfaren tillverkare associeras för jobbet.
Eftersom allt i designen är parvis, kommer det faktiskt inte vara för svårt att justera elementen exakt, det handlar bara om att dimensionera och passa paren med så mycket likhet som möjligt, vilket i sin tur kommer att säkerställa en maximal nivå av balans, jämvikt och synkronisering för systemet.
När ramverket är byggt är det dags att integrera de elektroniska kretsarna med relevanta motorer. Detta måste göras enligt instruktionerna i den angivna kretshandboken.
Kretskorten kan monteras på botten av den centrala plattan med lämpligt hölje eller över plattan, igen med ett lämpligt skåp för att täcka den tätt.

Förstå propellrarnas rotationsriktning
Analysera rotationsriktningen för motorpropellrarna för en balanserad lyftning av:
Med hänvisning till ovanstående animerade simulering bör motorpropellernas rotationsriktning justeras på följande sätt:
Det måste helt enkelt vara sådant att motorerna vid ändarna på en stång ska vara identiska men annorlunda mot den andra stångmotorns riktning, vilket innebär att om en stång har motorerna roterande medurs, så kompletterar motorerna i ändarna på den andra stången stången måste ställas in så att den snurrar moturs. riktning.
Se simuleringen ovan för att korrekt förstå motverkande rörelse för motorerna som kan behövas för att tilldelas motorerna för att säkerställa en balanserad
Hur man styr riktningen på fyrhjulingen genom att kontrollera motorns hastighet.
Ja, quadcopters flygriktning kan justeras och styras enligt din egen önskan och önskan genom att helt enkelt använda olika hastigheter (RPM) på berörda motorer.
Följande bilder visar hur den grundläggande hastighetsöverföringen kan tillämpas på relevanta motorer för att uppnå och utföra önskad flygriktning till maskinen:




Som framgår av ovanstående diagram, genom att på lämpligt sätt minska hastigheten för en uppsättning motorer, eller öka hastigheten för den motsatta uppsättningen motorer, eller justera hastigheterna enligt deras egna önskemål, kan fyrkoptern göras att färdas i luften i vilken som helst önskad specifik riktning.
Ovanstående bilder indikerar de grundläggande riktningarna, såsom framåt, bakåt, höger, vänster etc ... men alla andra udda riktningar kan också implementeras effektivt genom att på lämpligt sätt justera hastigheterna för de relevanta motorerna eller kan bara vara en enda motor.
Till exempel för att tvinga maskinen att flyga mot N / W-riktningen, kan endast S / E-motorns hastighet ökas, och för att möjliggöra för maskinen att flyga i N / E-riktningen kan hastigheten för S / E W-motorn kan ökas ... och så vidare. Det behöver bara övas tills full kontroll av quadcopter blir uppnåelig och behärskad av användaren.
Designa en praktisk quadcopter
Hittills har vi lärt oss om den grundläggande konstruktionen av drönarkroppen och hårdvaran, låt oss nu lära oss hur man gör en quadcopter eller en drönarkrets snabbt och billigt med mycket vanliga komponenter. I ett av mina tidigare inlägg lärde vi oss hur man gör en relativt komplex och därmed effektiv quadcopter-flygmaskin utan att använda mikrokontroller, för mer info vill du gå igenom följande inlägg:
Fjärrkontrollkrets utan MCU | Elektrisk krets
I den här artikeln försöker vi göra ovanstående design mycket enklare genom att eliminera de borstlösa motorerna och ersätta den med borstade motorer och därmed göra det möjligt att bli av med komplexet BLDC-drivkretsmodul .
Eftersom quadcopters mekaniska konstruktionsdetaljer redan diskuterats ovan kommer vi bara att behandla kretsdesignavsnittet och lära oss hur det kan byggas för att flyga den föreslagna enklaste drönarkretsen.
Som tidigare nämnts kräver denna enkla fyrkopter endast de grundläggande RF-fjärrkontrollmodulerna som visas i bilden nedan:

Du kommer behöva köp dessa RF-moduler från någon webbutik eller från din lokala elektroniska reservhandlare:
Bortsett från ovan nämnda RF-fjärrstyrda moduler 4 permanentmagnetborstade motorer kommer också att krävas, vilket faktiskt utgör hjärnan i dronmaskinen. Det kan vara som anges i följande bild med de angivna beskrivningarna, eller något annat liknande enligt de nödvändiga användarspecifikationerna:

Elektriska specifikationer för motorn:
- 6V = driftspänning (topp 12V)
- 200mA = driftsström
- 10.000 = RPM
Dellista
- 1K, 10K 1/4 watt = 1 vardera
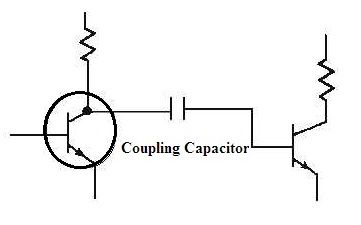
- 1uF / 25V kondensator = 1nr
- Förinställd 10K eller 5K = 1no
- Rx = 5 watt trådlindat motstånd, värde som ska bekräftas med experiment.
- IC 555 = 1 nr
- 1N4148 Dioder = 2 nr
- IRF9540 Mosfet = 1nr
- 6V motor borstad typ = 4nos
- Flexibla ledningar, löd, flöde etc.
- PCB för allmänt ändamål för montering av ovanstående delar
- 4-kanals RF-fjärrkontrollmodul, som visas i relevanta bilder.
- Aluminiumkanaler, skruvar, muttrar, plattor etc som förklaras i artikeln.
- Batteri enligt nedan:

Hur man konfigurerar fjärrkontrollmottagaren med motorerna
Innan du förstår hur du konfigurerar fjärrkontrollmottagaren med fyrhjulsmotorerna, är det viktigt att lära sig hur motorhastigheterna ska justeras eller justeras för att generera de önskade vänster-, höger-, framåt-, bakåtrörelserna.
Primärt finns det två sätt som en quadcopter kan aktiveras att röra sig, som finns i '+' och 'x'-lägena. I vår design använder vi det grundläggande '+' -läget för vår drönare, som anges i följande diagram:

Med hänvisning till ovanstående diagram inser vi att vi helt enkelt behöver höja hastigheterna för de relevanta motorerna för att utföra önskade riktningsmanövrer på drönaren.
Denna ökning av hastigheterna kan genomföras genom att konfigurera fjärrkontrollreläerna enligt följande kopplingsschema. I diagrammet nedan kan vi se en IC 555 PWM-krets ansluten med de 4 reläerna på fjärrkontrollmottagarmodulen på de 6 reläerna (1 relä är oanvänd och kan enkelt tas bort för att leda till utrymme och vikt).
Justera PWM
Som kan ses i diagrammet är PWM-matningen ansluten till alla N / C-kontakterna i reläerna, vilket innebär att quadcopter normalt skulle sväva genom denna enhetliga och lika PWM-matning, vars arbetscykel initialt kan justeras så att quadcopter kan uppnå en korrekt specificerad mängd tryck och höjd.
Detta kan experimenteras genom att korrekt justera den visade PWM-potten.
Hur man konfigurerar reläkontakterna
Reläernas N / O-kontakter kan ses direktanslutna med den positiva matningen, så när en relevant knapp trycks in på fjärrkontrollsändaren aktiveras motsvarande relä i mottagarmodulen, vilket i sin tur gör det möjligt för den aktuella motorn att få hela 12V-matningen från batteriet.
Ovanstående operation gör det möjligt för den aktiverade motorn att få högre hastighet än resten av motorerna, vilket gör det möjligt för fyrhjulingen att röra sig mot den angivna riktningen.
Så snart fjärrknappen släpps stannar drönaren omedelbart och fortsätter att sväva i konstant läge.
Identiskt kan andra riktningsrörelser enkelt uppnås genom att trycka på de andra tilldelade knapparna på fjärrkontrollen.
Det översta reläet är för att säkerställa en säker landning av maskinen, detta görs genom att lägga till ett strömfallsmotstånd i serie med N / O-kontakten för det visade reläet.
Detta motståndsvärde måste beräknas med vissa experiment så att fyrhjulingen svävar runt ett par meter över marken närhelst detta motstånd växlas genom det bifogade reläet.
Kretsschema

De visade reläerna är den del av RF-modulmottagaren, vars kontakter initialt är frånkopplade (tomma som standard) och måste anslutas som anges i ovanstående diagram.
RF-fjärrmottagaren ska installeras inuti fyrhjulingen och dess reläer är anslutna med relevanta motorer och batterier enligt ovanstående layout.
Du kan se några kontakter (grönfärgade) som i onödan kan lägga vikt på drönaren. Du kan ta bort dem alla för att minska vikten och ansluta relevanta ledningar direkt till kretskortet genom lödning.
Hur drönaren rör sig:
Som förklarats i ovanstående diskussion, när en viss fjärrknapp trycks in, aktiverar den motsvarande relä för fyrkoptersmodulen och får den aktuella motorn att röra sig snabbare.
Denna operation tvingar i sin tur maskinen att röra sig i motsatt riktning till motorn som växlas för att rotera vid snabbare varvtal.
Således får exempelvis en ökning av sydmotorns hastighet maskinen att röra sig mot norr, en ökning av den nordliga motorn får den att röra sig söderut, på liknande sätt ökar den östra motorhastigheten att den rör sig västerut och vice versa.
Intressant är att ökningen av syd / östmotorerna gör det möjligt för fyrkoptern att röra sig mot motsatt nord / väst som är i diagonalt läge ... och så vidare.
För- och nackdelar med ovanstående förklarade Enkel Qaudcopter fjärrkontrollkrets.
Fördelar
- Billigt och enkelt att bygga även av en relativt ny hobbyist.
- Kräver inte komplexa joystickoperationer.
- Kan styras med en enda 6-kanals fjärrkontrollmodul
Nackdelar
- Mindre effektiv när det gäller batteribackup på grund av borstmotorer
- Riktningshastigheten är konstant och kan inte varieras via fjärrkontrollen
- Manövrering kanske inte är smidig utan lite ryckig när du byter knappar.
Tidigare: Force Sensing Resistor Explained Nästa: Kapacitiv spänningsdelare