En elektrisk maskin som omvandlar elektrisk energi till mekanisk energi kallas en elektrisk motor. Först och främst elmotor är en enkel elektrostatisk enhet skapad av den skotska munken Andrew Gordon på 1740-talet. Men 1821 demonstrerade Michael Faraday omvandlingen av elektrisk energi till mekanisk energi.
Elmotorer klassificeras främst i två kategorier: växelströmsmotorer och DC-motorer . Återigen är varje kategori uppdelad i många typer. Många laster som blandare, kvarn, fläktar etc., oftast använda hushållsapparater där vi kan hitta olika typer av motorer och dessa kan köras med olika hastigheter med hastighetsreglering av motorerna. I den här artikeln ska vi diskutera om en av huvudtyperna av likströmsmotorer, nämligen Stegmotor och dess kontroll med hjälp av mikrokontrollern.
Stegmotor
En synkron och borstlös likströmsmotor som omvandlar elektriska pulser till mekaniska rörelser och därmed roterar stegvis med en viss vinkel mellan varje steg för fullbordande av en full rotation kallas stegmotor. Vinkeln mellan stegmotorns rotationssteg benämns motorns stegvinkel.

Stegmotor
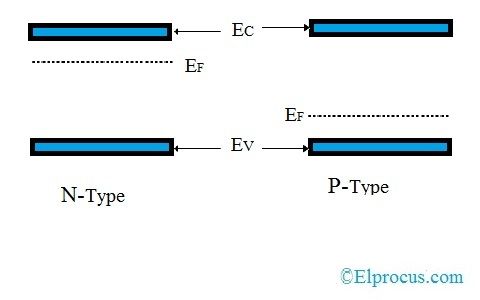
Stegmotorer klassificeras i två typer enligt deras lindning: Unipolära stegmotorer och bipolära stegmotorer. Den unipolära stegmotorn används ofta i många applikationer på grund av dess enkla manövrering jämfört med den bipolära stegmotorn. Men det finns olika typer av stegmotorer såsom permanentmagnetmotor, stegmotor med variabel motstånd och hybridmotor.
Stegmotorstyrning
Stegmotorn kan styras med olika tekniker, men här diskuterar vi stegmotorstyrningen med hjälp av en Atmega mikrokontroller . 89C51 är en mikrokontroller av 8051 mikrokontrollfamilj .

Blockdiagram över stegmotorstyrning
Blockdiagrammet för en stegmotorstyrning med en 8051 mikrokontroller visas i figuren med strömförsörjning , mikrokontroller, stegmotor och kontrollomkopplare.
2 metoder för att utforma stegmotorkontrollkrets
Stegmotorstyrenheten är konstruerad använder 8051 mikrokontroller och omkopplingskrets för styrning av stegmotorns hastighet. Kontrollbrytarkretsen kan utformas med hjälp av transistorströmställare eller genom att använda stegmotorstyrenhet IC såsom ULN2003 istället för transistorerna.
1. Kontrollkrets med stegmotorstyrenhet IC
Den unipolära stegmotorn kan roteras genom att aktivera statorspolarna i en sekvens. Sekvensen för dessa spänningssignaler som appliceras över motorspolarna eller ledningarna är tillräcklig för att driva motorn och följaktligen krävs ingen drivkrets för styrning av strömriktningen i statorspolarna.

Stegmotorstyrning med hjälp av IC
Tvåfas-stegmotorn består av fyra ändkablar anslutna till spolarna och två vanliga ledningar anslutna till de två ändkablarna bildar två faser. De gemensamma punkterna och slutpunkterna för de två faserna är anslutna till marken respektive Vcc respektive mikrokontrollstift. För att rotera motorn ska ändpunkterna för de två faserna aktiveras. Primärt appliceras en spänning på den första ändpunkten för fas1, och ytterligare spänning appliceras på den första slutpunkten för fas2, och så vidare.
Stegmotorn kan manövreras i olika lägen som Wave Drive Stepping Mode, Full Drive Stepping Mode och Half Drive Stepping Mode.
Wave Drive Stepping Mode
Genom att upprepa ovanstående sekvens kan motorn roteras i vågdrivningsläge antingen medurs eller moturs baserat på valet av slutpunkter. Tabellen nedan visar signalfassekvensen för våg-driv-steg-läge.


Wave Drive Stepping Mode
Stepping Mode för full körning
Att aktivera de två slutpunkterna i olika faser ger samtidigt ett steg-steg-läge. Tabellen visar signalfassekvensen för full-enhet-steg-läge.


Stepping Mode för full körning
Half Drive Stepping Mode
Kombinationen av stegen i våg- och full-steg-steg-läge ger ett halv-steg-steg-läge. Således delas stegvinkeln i detta läge i hälften. Tabellen visar signalfassekvensen för ett halvt steg-steg-läge.


Half Drive Stepping Mode
I allmänhet beror stegvinkeln på stegmotorns upplösning. Storleken på stegen och rotationsriktningen är direkt proportionell mot antalet och ordningen på ingångssekvensen. Axelns rotationshastighet beror på frekvensen för ingångssekvensen. Momentet och antalet magneter magnetiserade åt gången är proportionella.
Stegmotorn kräver 60 mA ström, men den maximala strömstyrkan för Atmega mikrokontroller AT89C51 är 50 mA. Så, en stegmotor-styrenhet ICanvänds för att koppla stegmotorn med mikrokontrollern för överföring av signalerna.
2. Kontrollbrytarkrets med hjälp av transistorer
Strömförsörjningen till kretsen kan ges genom att trappa ner spänningen från 230V till 7,5V med en nedtransformator och sedan rätta med en brygglikriktare med dioder . Denna rättade utgång matas till en filterkondensator och passeras sedan genom spänningsregulatorn. Den 5V reglerade utgången erhålls från spänningsregulatorn. Återställningsstiftet 9 är anslutet mellan kondensatorn och motståndet.

Stegmotorstyrkrets med transistor
I allmänhet består stegmotorn av fyra spolar som visas i figuren. Så för att köra motorn krävs fyra motorförare-kretsar. I stället för att använda stegmotorstyrenheten IC för att driva motorn är fyra transistorer anslutna som drivkretsar vid 21, 22, 23 och 24 stift på mikrokontrollen.
Om transistorerna börjar leda, skapas ett magnetfält runt spolen som orsakar motorns rotation. Stegmotorns varvtal är direkt proportionell mot ingångspulsfrekvensen. En kristalloscillator är ansluten till stiften 18 och 19 för att ge mikrokontroller klockfrekvens på cirka 11,019 MHz.
Exekveringstiden för vilken instruktion som helst kan beräknas med formeln nedan
Tid = ((C * 12)) / f
Där C = antal cykler
Och F = kristallfrekvens
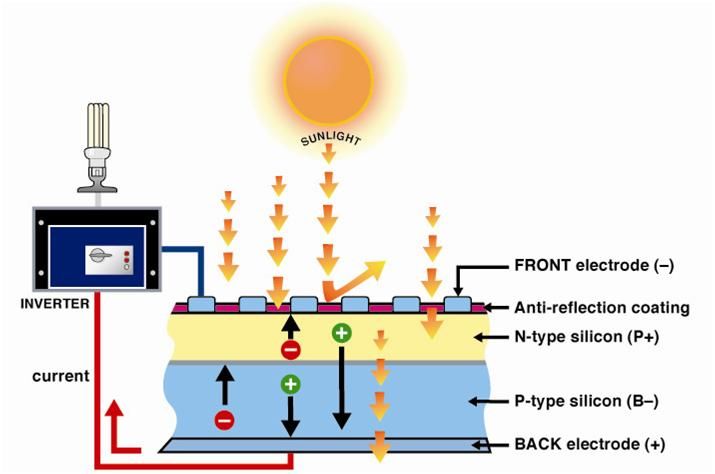
En av de applikationsbaserade kretsarna som använder en stegmotor för roterande solpanel beskrivs nedan.
Stegmotorstyrning med programmerad 8051 mikrokontroller
Sun Tracking Solar Panel-projekt är avsedd att generera maximal energi genom att automatiskt justera solpanelen. I detta projekt är en stegmotor som styrs av en programmerad mikrokontroller av 8051-familjen gränssnitt mot solpanelen för att bibehålla solpanelernas ansikte alltid vinkelrätt mot solen.

Stegmotorstyrning med mikrokontroller av Edgefxkits.com
De programmerad mikrokontroller genererar stegvisa elektriska pulser med jämna mellanrum till stegmotorn för att rotera solpanelen. Drivkretsen IC används för att driva stegmotorn eftersom styrenheten inte kan tillhandahålla motorns effektbehov.
Lämna dina förslag, feedback och frågor genom att lägga upp kommentarer i kommentarfältet nedan. Vi kommer att göra vårt bästa för att hjälpa dig tekniskt angående denna artikel och utveckla el- och elektronikprojekt med stegmotorn.