Det finns olika typer av sensorer tillgängliga på marknaden som kan användas i olika applikationer. På samma sätt ökar också sensorer som används i mobila enheter snabbt. Att kombinera information från mikrofoner, kameror, sensorer baserade på närhets- och tröghetssensorer kan djupt förbättra tillförlitligheten hos sensordata. Med fusionssensorn kan designers skapa virtuella sensorer som överbryggar vad som kan beräknas till vad designers vill upptäcka. Den här artikeln diskuterar en översikt över den virtuella sensorn och den fungerar.
Vad är Virtual Sensor?
Till virtuell sensor används för att uppskatta produktens egenskaper, annars är processförhållandena med hjälp av matematiska modeller som använder avläsningar av en extra fysisk sensor för att beräkna det förväntade tillståndet eller egenskapen.

virtuell sensor
Generellt är säkerheten för dessa sensorer, särskilt i synnerhet och nätverksproduktion, också elektrifierande: För när data produceras, bearbetas och transporteras, kan de också hackas. I vilket fall som helst är säkerhet en fast punkt inom digitaliseringsmetoden. Om data inte försvaras kan digitaliseringen inte gå snabbare så fort du observerar det.
Arbetssätt
Enligt definitionen är denna sensor en typ av programvara som ger tillgänglig information och processer. Den lär sig att förstå förhållandena mellan de olika variablerna och kontrollerar avläsningarna från olika instrument.
När vi kör simuleringsprogramvara och vi får korrekta ingångar, och det imiterar en produkts prestanda i verkliga livet, kan vi ta mätningar på olika platser med en simuleringsmodell. Så avläsningarna kan erhållas från den virtuella sensorn.
Virtuella sensorer i Windows 8 och Android
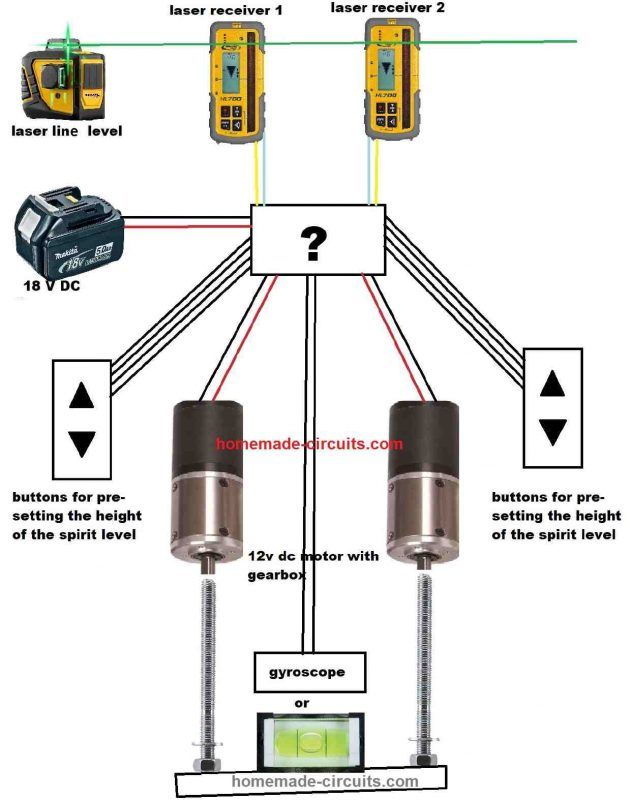
Detta är kombinationen av mätningar av accelerometer, gyroskop och magnetometer för att bestämma enhetens fullständiga orientering.
Virtuella sensorer omvandlar data från flera sensorer till värdefull information som inte kan uppnås från en enda sensor. Android ger fyra huvudsakliga virtuella sensorer som
- TYPE_GRAVITY
- TYPE_ORIENTATION
- TYPE_LINEAR_ACCELERATION
- TYPE_ROTATION_VECTOR
På samma sätt innehåller Windows 8 fyra virtuella sensorer som inkluderar följande.
- Orienteringssensor
- Lutningskompenserad kompass
- Lutning
- Skaka
Dessa sensorer är tillåtna genom sensorfusion som används för utvecklare för att skapa applikationer baserat på rörelse. De kan också erbjuda ytterligare information om kunden annars deras nuvarande aktiviteter. Att få sådan data kommer att falla under den gemensamma gruppen av kontextmedvetenhet.
Tillämpningar av Virtual Sensor
Dessa sensorer används ofta när:
- Tillgångarna kan inte beräknas med en fysisk enhet
- En fysisk sensor är mycket långsam och långt nedströms
- En fysisk sensorimplementering är mycket kostsam
- Miljön för sensorn är mycket fientlig
- En sensor är felaktig
- Sensorunderhåll är dyrt
Således handlar det här om den virtuella sensorn . Genom att använda denna sensor har en normal acceleration utvecklats inom flygkontrollsystemet för miniflygplan. Dessa sensoringångar är de kombinerade utgångarna för olika sensorsignaler. Denna sensor känns igen från simulerad information med hjälp av en komplett och realistisk Matlab-replika som används av flygplanets designer. Denna sensor används för att känna igen en defekt sensor i fallet att bara två faktiska sensorer är tillgängliga och också för att upptäcka ett fel i den senast befintliga sensorn. Här är en fråga till dig, vilka fördelar har den virtuella sensorn?