När det gäller förbättring av industri- och teknikområdet har motorer ett avgörande ansvar. Det omfattande användandet av motorer har förbättrat både kraft- och styrapplikationer. Med denna enorma framträdande effekt av reglerande motorer blir användningen också ökad dag för varje år. Steppmotor är en typ av styrmotor som arbetar med hastighets- och lägesreglering utan användning av en återkopplingsslinga. Detta fenomen betecknas som Open-Loop Control Motor. Så den här artikeln ger en tydlig beskrivning av en av typerna av stegmotor och den är 'Variabel Motvillighet Stegmotor'. Nedanstående avsnitt förklarar hur den här enheten fungerar, principen använder fördelar och nackdelar.
Vad är steglös motor med variabel motstånd?
Detta är den vanligaste typen av stegmotorer. Den har den enklaste designen jämfört med andra typer av stegmotorer. Eftersom rotorsektionen är icke-magnetiserad finns det inga attraktionskrafter mellan statorn och rotor . På grund av detta genererar inte stegmotorn med variabel motstånd ingen spärr vridmoment .
Den dynamiska vridmomentgenereringen är för minimal men har ett vridmomentfall när motorn går med höga hastigheter. Så den här variabla motståndsmotorn är mestadels tillämplig på hastigheten mellan medel och hög. Dessa motorer har också höga ljudnivåer, så lämpliga för scenarier där buller inte beaktas.
Princip
Det grundläggande stegmotorns arbetsprincip med variabel motstånd är att det är beroende av rotoranordningens flera motståndslägen. När statorfaserna tar emot spänningssignalen och får excitationer kommer det att skapas ett magnetfält vars axellinjer är över polerna.
Och nu, när rotorn försöker rotera i en sådan väg att den får låg motvilja. Denna revolution motsvarar att en positionsmagnetfältaxel som skapats av statorn är densamma som den axel som passerar över rotorpolerna (två av polerna).
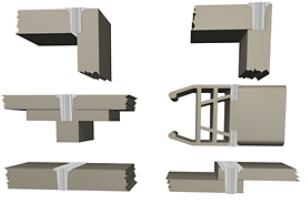
Stegmotorkonstruktion med variabel motstånd
Huvudsakligen består den här enheten av en sårad stator och flertandiga rotorsektioner. Statorlindningarna är täckta med en rad silikonbeläggningar. I allmänhet täcks detta av tre faser som är utspridda mellan stolparna. Så, antalet poler i statorsektionen är samma som de jämnt flera faserna för de lindningar som finns täcks av statorn. I bilden nedan har statorn 12 lika separerade projektionsstolpar där varje stolpe är täckt

Stegmotorkonstruktion med variabel motstånd
med en excitationsspole. De tre faserna aktiveras sedan med hjälp av a DC-källa genom stöd av halvledarströmställare. Medan rotorsektionen inte har några lindningar och den anses vara en framträdande poltyp som är konstruerad av slitsade stålöverdrag. Här är statortänderna och rotorns projicerade tänder av samma bredd, medan antalet poler i båda dessa sektioner är olika vilket ger möjlighet att starta av sig själv och möjliggör motorrotation i två riktningar.
Här är förhållandet mellan stator- och rotorpolerna motsvarande trefas variabel motstånd stegmotor ges som
Nr = ns ± (Ns / m)
Där ”Ns” motsvarar antalet statorpoler
'Nr' motsvarar rotorstolpar
Arbetsscenario
Stegmotorns rörelse med variabel motvilja kan lätt förklaras genom att överväga tre fall. Låt oss veta hur den här enheten fungerar i detalj. Tänk på figuren nedan.
Arbetet förklaras när de tre lindningarna X, Y och Z är seriekopplade och de aktiveras efter varandra med de tre omkopplarna S1, S2 och S3.
Scenario 1
När strömförsörjningen tillhandahålls över kanterna XX1, genom att stänga S1-omkopplaren. Eftersom det finns magnetiska poler mellan XX1lindningar, på grund av attraktionskraft mellan de magnetiska polerna, försöker rotorn åstadkomma ett lågt värde av motståndsläge. Så, 1 och 3 rotoraxel försöker vara i linje med XX1polaxeln.

Arbetsscenario 1
Scenario 2
När strömförsörjningen tillhandahålls över kanterna YY1, kommer det att bli en modifiering i statorpolernas magnetiska axel. Nu försöker rotorn åstadkomma en låg motståndsriktning för att skapa rotorrörelsen. Här kommer rotorstolparnas 2 och 4 axlar så nära YY1lindningar. Detta skapar rotorrotation och 2 och 4 rotoraxlar försöker vara i linje med YY1polaxeln. Därför kommer rotorrörelsen att röra sig 30 grader.

Stegmotorns variabla motståndsscenario 2
Scenario 3
På samma sätt, när ZZ1-lindningarna aktiveras av S3 gör XX1 och YY frånkopplade. Rotoraxelns magnetiska poler försöker vara i linje med statorn. Därför kommer rotorrörelsen att röra sig med 30 grader, så det kommer att bli en total rotation på 60 grader från XX1är ZZ1.

Arbetsscenario 3
Med ett framgångsrikt genomförande av tre faser på motsvarande sätt avslutar motorn en varv i 12 steg. Och rotorriktningen baseras på den leveransserie som tillhandahålls till statorfasen. Då har vridmomentgenereringen som arbetar på enheten en direkt proportion till den dubbla av fasströmmen som är T αtvå.
Fördelar och nackdelar
De fördelarna med en stegmotor med variabel motstånd är:
- Förbättrade accelerationshastigheter
- Lättmanövrerad och kostnadseffektiv
- Snabbt dynamiskt svar
- Andelen vridmoment till tröghet är mer
De nackdelarna med stegmotorn med variabel motstånd är:
- Kapaciteten är minimal när det finns enorma tröghetsbelastningar
- Det kommer att finnas en begränsning av uteffekten
Det här handlar om det detaljerade konceptet för denna enhet. Detta avsnitt har gett en förklaring av stegmotorns variabla motståndsarbete, användningsområden, konstruktion och funktionsprincipen. Dessutom vet också vad tillämpningar av stegmotorn med variabel motstånd och dess användning på flera domäner är.