
Numera blir robotik en av de mest avancerade inom teknikområdet. De tillämpningar av robotik främst involverar i bilar, medicinsk, konstruktion, försvar och används också som en brandbekämpningsrobot för att hjälpa folket från brandolyckan. Men att styra roboten med en fjärrkontroll eller en omkopplare är ganska komplicerat. Så ett nytt projekt utvecklas, det vill säga en accelerometerbaserad gestkontrollrobot. Huvudmålet för detta projekt är att kontrollera handens rörelse med hjälp av acceleration.

Accelerometerbaserad gestkontrollrobot
Accelerometerbaserad gestkontrollrobot
Detta projekt inkluderar sändaravsnitt och mottagaravsnitt. De nödvändiga komponenter för att bygga detta projekt är Ht12e, Ht12d, L293D, AT89S52, 7805, kondensator, kristall, PBT-kontakt, enpolig antenn, motstånd, LED, accelerometer och batteri. Accelerometern är en viktig enhet i detta projekt.
accelerometern eller sändarenheten beror på handresten. Genom sändarenhet mottas ett kommando och det bearbetas med hjälp av At89S51 mikrokontroller. Detta mikrokontroller ger signal till roboten att röra sig i önskad riktning. Den grundläggande arbetsprincipen för denna robotuppsättning av datasignalerna för överföring av enhetsavläsningar till den mikrokontroller som är monterad i roboten. Den förprogrammerade mikrokontrollern körs enligt programmet, vilket får roboten att arbeta därefter.
En geststyrd robot som använder en accelerometer är en typ av robot som kan manövreras genom handrörelse genom att placera en accelerometer på den. Detta projekt är uppdelat i två delar sändare och mottagare. När en gestanordning fungerar som en sändarenhet och en robot fungerar som en mottagarenhet. När en sändare (accelerometer) placeras på handen, skickar den signaler till roboten för den nödvändiga operationen.
De viktigaste komponenterna som används i sändningssektionen inkluderar en accelerometer, komparator, HT12E IC-kodare och RF-sändare .
Accelerometer
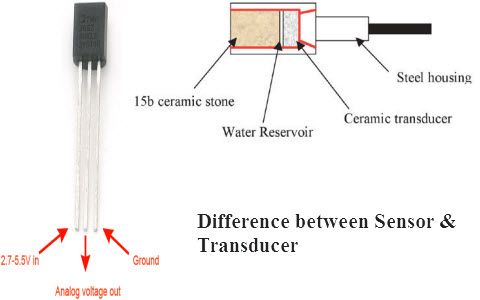
En accelerometer är en typ av sensor och det ger analoga data medan de rör sig i riktningen X, Y och Z. Dessa riktningar beror på sensortypen. Diagrammet över accelerometern visas nedan. Denna sensor består av pilriktningar, om vi lutar sensorn i en riktning, kommer data vid den specifika stiftet att ändras i form av analog. Accelerometern består av sex stift, var funktionen för varje stift diskuteras nedan.

Accelerometer
- Stift-1: VDD-stift används för att ge + 5V matning till denna stift
- Stift-2: GND-stift är ansluten till marken för förspänning
- Pin-3: X-pin tar emot data i X-riktning
- Stift-4: Y-stift tar emot data i Y-riktningen
- Pin-5: Z-pin tar emot data i Z-riktning
- Stift-6: ST-stift används för att justera känsligheten för accelerometern 1,5 g eller 2 g eller 3 g eller 4 g
Jämförelse
Jämföraren används för att ändra den analoga spänningen till digital spänning och jämför den analoga spänningen med en referensspänning och ger en exakt låg spänning eller hög spänning
Kodare
Denna kodare används för att koda 4-bitars data och sänder med hjälp av en RF-sändarmodul.
RF-sändarmodul
RF TX-modulen fungerar med 433MHz frekvens och denna modul är lätt tillgänglig på marknaden till låg kostnad
De viktigaste komponenterna som används i mottagningssektionen inkluderar mottagare, avkodare, mikrokontroller och motorförare.

Sändaravsnitt
RF-mottagare
RF-mottagaren för detta projekt kommer att ta emot de data som överförs av den sändande enheten.
Avkodare
Avkodaren används för att ändra seriell data till parallell data som tas emot från RF-mottagarmodulen.
Microcontroller
De mikrokontroller är den viktigaste delen av roboten. En 8051-familjemikrokontroller används i kretsen för att ge en beslutskapacitet
Motorförare
Motorföraren är en anordning som ger rörelsen att utföra en uppgift som en motor. Så vi kräver att motorföraren kör dem genom styrenheten. Gränssnittet mellan motor och mikrokontroller kan göras med hjälp av en L293D-motorförare IC i denna krets.
Vid mottagarsektionen tar en RF-mottagarmodul emot data från sändaren. De mottagna uppgifterna kan avkodas av en IC HT12D. De mottagna uppgifterna kan bearbetas av AT89S51 mikrokontroller och motorföraren används för att styra motorn.

Mottagarsektion
Gestkontrollrobot fungerar
Accelerometerbaserad geststyrd robot rör sig enligt handrörelsen när vi placerar accelerometern på din hand. När vi lutar handen med en accelerometer framför roboten, börjar roboten röra sig framåt tills nästa rörelse ges. När vi lutar handen bakåt, ändrar roboten sin riktning och tillstånd. Sedan börjar den röra sig bakåt tills nästa signal ges. När vi lutar handen på vänster sida rör sig roboten in i vänster sida tills nästa signal ges. På samma sätt när vi lutar handen i höger sida rör sig roboten till höger.
Applikationer
De tillämpningar av accelerometern baserad geststyrd robot inkluderar
- Dessa robotar används i militära applikationer för att driva robotar
- Dessa robotar används i medicinska applikationer för operation
- Dessa robotik används inom byggfältet
- Dessa robotik används i industrier för att styra troll och lyft.
Det handlar alltså om Accelerometer-baserad gestkontrollrobot, dess arbete och applikationer. Vi hoppas att du har fått en bättre förståelse för detta koncept. Dessutom är alla tvivel angående detta koncept eller elektronikprojekt , ge din feedback genom att kommentera i kommentarsektionen nedan. Här är en fråga till dig, vad är applikationerna för accelerometerbaserad gestkontrollrobot?
Fotokrediter:
- Accelerometerbaserad gestkontrollrobot ytimg
- Accelerometer static.flickr








{kind=link}
{kind=link}