
Döden är något som är oundvikligt. Men vad sägs om plötslig död bara på grund av någon olycka på vägen eller mer värst - en skada som kan skada en människas liv för alltid. Sänder det inte en frossa ner i ryggraden, bara genom att tänka på det? Vad är den främsta orsaken till olyckorna? Naturligtvis vårdslös körning och utslagskörning av fordon, särskilt på en jämn väg som på hög väg.
Enligt statistisk rapport berodde cirka 1200 dödsfall under år 2005-2009 på grund av olyckor på grund av utslagskörning. Och vad mer, du kan höra nyheter om olyckor på grund av utslag förare nästan dagligen.
Så finns det något sätt att förhindra det? Självklart!
Det kan finnas många sätt som att vara en bra förare och följa trafikreglerna, bibehålla en normal hastighet. Men det finns ett viktigt sätt att hålla en vakt på fordonets hastighet och följaktligen övervaka den.
Detta kan göras tekniskt genom att utforma ett sätt att kontrollera fordonets hastighet.
2 sätt att kontrollera hastighet:
- Installera hastighetssensorer på vägsidan eller i mitten av vägen .
- Innehåller videobildprocessorer : Den består av en kamera installerad på vägarnas stolpar, som ständigt övervakar situationen genom att ta bilder i snabb följd av ramar. Trafikflödesparametrarna analyseras och behandlas därefter i en signalprocessor.

Bild som visar trafikövervakning med videokamera
- Införliva RADAR på banorna :En RADAR kan användas för att kontrollera fordonets hastighet genom att skicka en signal i mikrovågsband mot fordonet och analysera en förskjutning i frekvensen för den reflekterade signalen. RADAR står för Radio Detection and Ranging. Den sända signalen kan vara en signal med konstant frekvens eller växlande frekvens. Normalt används en CW Doppler RADAR på vägsidan.

Hastighetsavkänning med RADAR
- Installera IR-sensorer : IR-sensorer med en kombination av IR-LED och fotodiod kan användas för att övervaka fordonets sträcka och samtidigt beräkna dess hastighet. Grundidén innebär att man placerar ett par IR-lysdioder och fotodioder med frekventa intervaller, på vardera sidan av vägarna och övervakar avbrottet mellan vägen mellan IR-lysdioden och fotodioden.
Här är en enkel prototyp av ovanstående metod. Provprototypen fungerar med två par IRLED-fotodiod.

En prototyp för hastighetskontroll med IR-sensor av Edgefx-satser
Den består av följande avsnitt:
- Ett fotodiod-LED-par för att känna av fordonet
- En räknare för att räkna och visa den tid det tar för fordonet att korsa vägen mellan de två fotodiodledda paren.
- En summer för att ange om hastigheten överstiger den inställda gränsen.
- Timer-IC för att ge signalerna vid lämplig tidpunkt.
- Använd LIDAR-pistol : A LIDAR är ett LASER-baserat detekterings- och intervallsystem. Trafikpolisen kan bära en bärbar LIDAR-pistol som skickar en kort burst av infrarött ljus och eftersom detta ljus reflekteras tillbaka av det rörliga fordonet gör pistolen en redogörelse för den tid det tar av den reflekterade signalen och som divideras med två för att mäta avståndet. Hastighet mäts genom att dividera antalet prover med en fast tidsvaraktighet på några sekunder. Det fungerar som ett RADAR-system förutom att det använder ljusvågor istället för radiovågor.

En LIDAR-pistol i händerna på en trafikpolis
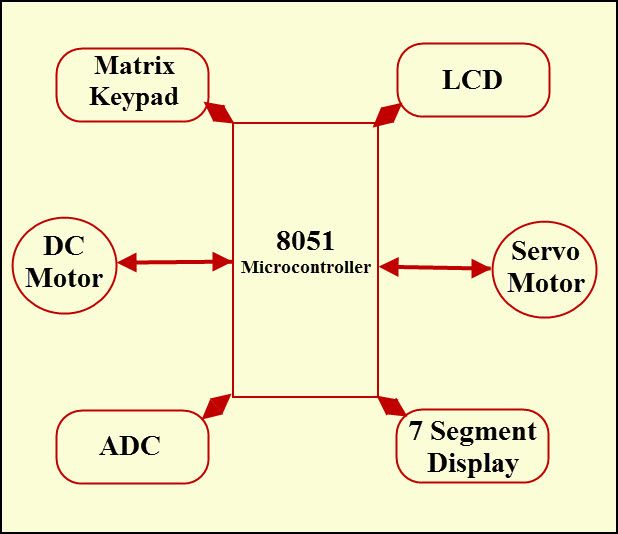
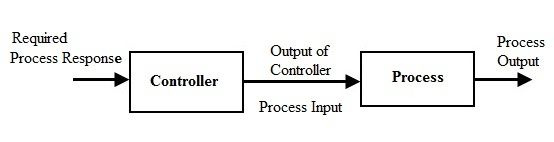
Arbeta med hastighetskontrollsystem med IR-sensorer

Blockdiagram som visar Working of Speed Checker System med IR-sensorer av Edgefx-satser
När ett fordon korsar vägen mellan det första paret IRLED-fotodiod blockerar det ljusets väg och fotodiodmotståndet ökar, vilket orsakar en motsvarande låg signalutgång till timern IC1. Timern IC1 producerar en hög signal vid sin utgång under en fast varaktighet av 10 ms. Under normala förhållanden, vid normal hastighet, blir det inget avbrott i vägen mellan 2ndFotodiod-IR LED-par och motsvarande ingång till timern IC2 kommer att vara hög, vilket orsakar en låg logisk signal vid dess utgång. Utgångarna från båda timrarna är anslutna till NAND-grinden 2m vilket ger en hög utgång (för låga och höga ingångar), ansluten till ingången till timer IC3. Motsvarande utgång från timer IC är låg, vilket gör att summern är i avstängt tillstånd. På samma gång ges utgången från timern IC1 till båda ingångarna till NAND-grinden 1, vilket ger en låg logisk utgång som ges till timern IC4 för att ge en hög logisk utgång, ansluten till återställningsstiftet för timern IC5. Utgången från timer IC5 är motsvarande hög, vilket ger räknaren IC hög puls. Counter-sektionen består av ett 4-stegs Decade Counters för att läsa antal siffror. Varje räknare-IC-klocka är ansluten till klocksignalen från den tidigare räknar-IC. Räknaren ökar sitt antal vid varje stigande kant av klockpulsen.
Antag nu att fordonet rör sig med så hög hastighet att det når vägen mellan det andra IRLED-fotodiodparet under den tid som ställts in för timern IC1. Så nu kommer räknaren att visa ett antal under det normala antalet och samtidigt, eftersom NAND-grinden2 blir hög vid båda sina ingångar, blir dess utgång låg och motsvarande tar timern IC3 låg ingång för att ge en hög logisk utgång och följaktligen utlösa summerlarmet.
Avståndet mellan de två paren dividerat med motavläsningen ger sålunda fordonets hastighet och om denna hastighet ökar den angivna gränsen ringer summern och ger en tydlig indikation på att hastighetsgränsen har överskridits.
Jag har gett en detaljerad förklaring av ett av sätten. Alla andra sätt är välkomna att ges som feedback.
Fotokredit:
- Trafikpolis med en LIDAR-pistol förbi Wikimedia










{kind=link}