
Vanligtvis använder fjärrkontrollrobotar RF-kretsar, som har nackdelarna med begränsat arbetsområde, begränsad kontroll och begränsat frekvensområde. För att övervinna dessa nackdelar, mobiltelefonstyrd landrover robotfordon används. Det ger fördelarna med robotstyrning, intrångsfria styrenheter och upp till tolv styrsystem etc.
Även om möjligheterna och utseendet på inbäddad robotik varierar mycket, alla robotar delar funktionerna i en rörlig, mekanisk struktur under någon form av kontroll. Kontrollen av robotar involverar tre olika faser, de är uppfattning, bearbetning och handling. Normalt är sensorerna monterade på roboten. Uppfattningen och bearbetningen görs av den inbyggda mikrokontrollern, och åtgärden utförs med hjälp av motorer.
Mobilmanövrerad Land Rover-robotfordon

Mobiltelefonstyrd Land Rover-robotfordon av Edgefxkits.com
Huvudsyftet med detta projekt är att kontrollera en robotarm som monteras på ett robotfordon med hjälp av en mobiltelefon. Det ger ett stort arbetsområde och robust kontroll etc.
Blockdiagram över mobiltelefonstyrda Land Rover-robotfordon:

Blockdiagram över mobiltelefonstyrd Land Rover
De viktigaste byggstenarna är mikrokontroller, mobiltelefon, DTMF-avkodare och likströmsmotordrivkrets. Mobiltelefonen är den viktigaste delen av hela systemet eftersom hela systemet fungerar och aktiveras av mobiltelefonen. DTMF (multifrekvens med dubbelton) tar emot insignalen från mobiltelefonen och avkodar den och genererar sedan 4-bitars digital utgång från 8051 mikrokontroller . När DTMF-avkodaren ger en digital utgång genererar den också ett avbrott varje gång.
Mikrokontrollern är hjärtat i hela systemet när den utför hela kontrollåtgärden. Microcontroller beror på koden som genereras av DTMF-avkodaren för att flytta roveren åt höger eller vänster och framåt eller bakåt genom att rotera båda likströmsmotorerna. DC-motorföraren tar emot aktiveringssignaler från mikrokontrollern när det gäller låg eller hög logik, sedan förstärker den och roterar två motorer i båda riktningarna.
Kontrollen av roboten omfattar huvudsakligen fyra olika faser: perception, åtgärdsbehandling och detektering. I uppfattningsstadiet om mobiltelefonen som är ansluten till roboten tar emot ett samtal, avkodar den tryckande åtgärden på tangenten på mobiltelefonen den genererade DTMF-tonen. Därefter tar avkodarkretsen emot ljudsignalen från mobiltelefonen och omvandlar sedan DTMF-tonen till en binär kod, som sedan matas till mikrokontrollern. I detta projekt används en MT88710 IC som en DTMF-avkodare. I behandlingssteget behandlar mikrokontrollern den binära koden som tas emot från DTMF-avkodaren. De Microcontroller är förprogrammerad i “C” för att utföra den här uppgiften enligt ingångsbitarna.
På åtgärdssteget beror motorns rotation på ingången från mikrokontrollern. Två likströmsmotorer vardera med 30 varv per minut används för landrover och drivs av motorföraren IC. Vid upptäckt av scenen och för detektering av hinder, an infraröd sändare och mottagare används tillsammans med summern. När hindret kommer framför roboten sänder IR-sändaren IR-strålarna på objektet, sedan reflekterar objektet IR-strålarna till IR-mottagaren. IR-mottagaren tar sedan emot IR-strålarna för att aktivera summern.
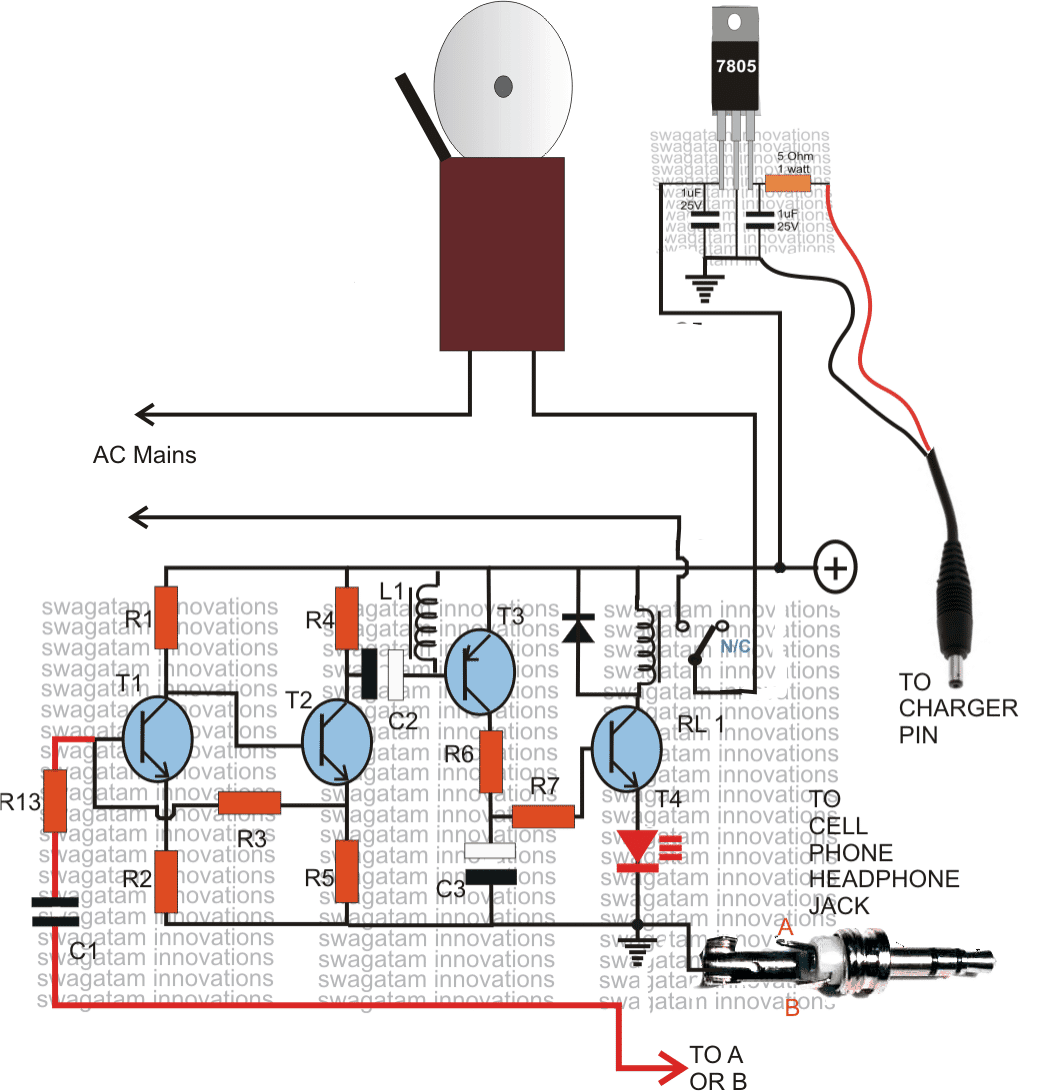
Kretsschema över mobiltelefonstyrt landrover-robotfordon:
Huvudkomponenterna i denna mobiltelefonstyrda robotlandrover är mikrokontroller, motorförare och DTMF-avkodare. En MT8870-serie DTMF-avkodare används i detta projekt som använder digitala räknetekniker för att detektera de 16 DTMF-tonparen till en 4-bitars kodutgång. Den inbyggda ringtonkretsen eliminerar förfiltrering. Om en ingångssignal ges vid pin2, känns det igen att ingångskonfigurationen är effektiv. 4-bitars avkodningssignalen för DTMF-tonen överförs till stiftet 11 genom stiftets 14 utgång. Dessa stift är anslutna till mikrokontrollstiften Pao, Pa1, Pa2 och Pa3. Utgången från mikrokontrollern från portstiften PD0 till PD3 och PD7 matas till ingångarna IN1, IN4 och gör det möjligt för stiften EN1, EN2 på motorföraren L293D IC att kör de två likströmsmotorerna .

Kretsschema över mobiltelefonstyrd Land Rover
I denna krets används S1-omkopplare för manuell återställning. Utgången från mikrokontrollern räcker inte för att driva likströmsmotorerna, så nuvarande drivrutiner är nödvändiga för motorrotation. L293D-motorföraren är utformad för att ge dubbelriktade drivströmmar på upp till 600 mA vid spänningar från 4,5V till 36V, vilket gör det lättare att driva likströmsmotorerna. L293D-motorföraren består av fyra förare. Stiften IN1 till IN4 & OUT1 och OUT4 är ingångs- och utgångsstiften för drivrutinen 1 till drivrutinen 4. Drivrutinerna 1,2,3 och 4 aktiveras av aktiveringsstiftet 1 (EN1) och stiftet 9 (EN2). När aktiveringsingång EN1 (pin1) är hög är drivrutinerna 1 och 2 aktiverade. På samma sätt möjliggör aktiveringsingången EN2 (pin9) drivrutinerna 3.
Fördelar och nackdelar:
Fördelarna med mobiltelefonmanövrerad robotrobot inkluderar trådlös styrning av försörjnings- och övervakningssystem, 3G-teknikbaserad fordonsnavigering och obegränsat driftsområde baserat på mobiltelefonnätverket. Nackdelen inkluderar: kostnaden eftersom fakturering av mobiltelefoner är hög urladdning av mobila batterier : urladdningsproblemet associerat med batterierna eftersom batterierna förlorar laddningen på grund av snabb urladdning eftersom belastningen är hög anpassningsbar: systemet kan inte anpassas till alla mobiltelefoner, men de med headsetet kan bara användas.
Således är detta mobiltelefondrivna robotprojekt mycket användbart i militära applikationer för att kontrollera militära fordon med hjälp av en mobiltelefon. I framtiden kan vi upptäcka fiendernas position genom att ordna en trådlös kamera till landrover-robotfordonet. Detta projekt kan också vara till hjälp i akademiker eftersom studenter kan lära sig olika terminologier och principer som föreslås i detta projekt. Detta projekt hjälper eleverna att lägga till sina innovativa tankar och idéer till utveckla robotikprojekt .
Fotokrediter:
- Mobiltelefonstyrd Land Rover av santoshbanisetty
- Kretsschema över mobiltelefonstyrd Land Rover av ingenjörsgarage










{kind=link}