
CAN eller Controller Area Network är en tvåkopplad halvduplex höghastighets seriell nätverksteknik. Den används i grunden för kommunikation mellan olika enheter i en lågradie-region, till exempel i en bil. Ett CAN-protokoll är ett CSMA-CD / ASM-protokoll eller bäraravkännande med flera åtkomst kollisionsdetekteringsarbitrer på meddelandeprioritetsprotokoll. CSMA säkerställer att varje nod måste vänta en viss period innan meddelandet skickas. Kollisionsdetektering säkerställer att kollisionen undviks genom att välja meddelanden baserat på deras föreskrivna prioritet.
Det ger en signalhastighet från 125 kbps till 1 Mbps. Den tillhandahåller 2048 olika meddelandeidentifierare.
Det är ISO-11898-standard och använder sig av 7-lagers samtrafikmodellen för öppna system.
Historia:
Den utvecklades av Robert Bosch 1982 och släpptes officiellt av Detroits Society of Automotive Engineers 1986. Den första bilen som integrerade CAN-bussen tillverkades av Mercedes Benz 1992.
ISO 11898 Arkitektur:

Bildkälla - theremino
Den skiktade arkitekturen består av tre lager
- Applikationsskikt : Det interagerar med operativsystemet eller applikationen av CAN-enheten.
- Datalänkskikt : Den ansluter faktiska data till protokollet när det gäller att skicka, ta emot och validera data.
- Fysiskt lager : Det representerar den faktiska hårdvaran.
Standard CAN-ramen består av följande bitar:
 Standard CAN-ramen består av följande bitar:
Standard CAN-ramen består av följande bitar:
- SOF- Start av Fr en jag. Meddelandet börjar från denna punkt.
- Identifiera : Den bestämmer meddelandets prioritet. Sänk det binära värdet, högre är prioriteten. Det är 11 bitar.
- RTR - Begäran om fjärröverföring. Det är dominerande när information krävs från en annan nod. Varje nod tar emot begäran, men endast den nod vars identifierare matchar meddelandets är den nödvändiga noden. Varje nod får också svaret. Z
- HÄR - Enkel identifieringstillägg. Om den är dominerande betyder det att en standard CAN-identifierare utan förlängning överförs.
- R0 - reserverad bit.
- DLC - Datalängdskod. Den definierar längden på den data som skickas. Det är 4 bitar
- Data - Upp till 64 bitars data kan överföras.
- CRC - Cyklisk redundanskontroll. Den innehåller kontrollsumman (antal överförda bitar) av föregående applikationsdata för feldetektering.
- ACK - Erkänna. Det är för 2 bitar. Det är dominerande om ett korrekt meddelande tas emot.
- EOF - slutet av ramen. Det markerar slutet på burkram och inaktiverar bitfyllning.
- IFS - Interramutrymme. Den innehåller den tid som krävs av styrenheten för att flytta en korrekt mottagen ram till rätt läge.
5 olika meddelandetyper är:
- Dataram : Den består av ett godtyckligt fält, datafält, CRC-fält och bekräftelsefält.
- Fjärrram : Den begär överföring av data från en annan nod. Här är RTR-biten recessiv.
- Felram : Den överförs när ett fel upptäcks.
- Överbelastningsram : Den används för att ge en fördröjning mellan meddelanden. Det överförs när noderna blir för upptagen.
- Giltig ram : Ett meddelande är giltigt om EOF-fältet är recessivt. Annars skickas meddelandet igen.
CAN Fysiskt lager:
Kan buss

Bildkälla - digital.ni
Den består av en två-tråds seriell länk - CAN_H och CAN_L och deras spänningsnivåer i förhållande till varandra avgör om en 1 eller 0 sänds. Detta är differentiell signalering. Strömmen som strömmar i varje signallinje är lika men motsatt i riktning, vilket resulterar i en fältavbrytande effekt som är en nyckel till låga bulleremissioner. Detta säkerställer en balanserad differentiell signalering som minskar bullerkopplingen och möjliggör hög överföringshastighet över ledningarna. Vanligtvis är kablarna tvinnade kablar med en busslängd på 40 m och maximalt 30 noder. Det är en skärmad eller oskärmad kabel med en karakteristisk impedans på 120 ohm.
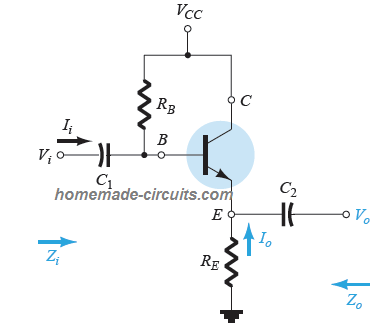
KAN ÖVERFÖRA:

CAN för fordon av Hugo Provencher. De två ledningarna CANH och CANL är normalt 2,5V bestämda av de två transistorerna och 2,5V spänningskällan. I grund och botten ska skillnaden mellan de två ledningarna alltid vara 0. Förarkontrollen bestämmer spänningen som appliceras på CANH- och CANL-ledningarna. När båda transistorerna leder, faller spänningen över 1sttransistorn och dioden är 1,5V, vilket gör att CANH-ledningen drar upp till 3,5V. Spänningsfallet över 2ndtransistorn och dioden är 1V, vilket gör att CANL-kabeln drar ner till 1,5V. Dioderna används för högspänningsskydd. Mottagaren är en diskrimineringskrets som ger en utgång på 1 när de två ingångarna CANH och CANL är desamma och en utgång på 0 om de två ingångarna är olika. TXD-dominerande block används för jordfelsskydd och termiskt avstängningsblock inaktiverar förarkontrollen om dioderna och transistorerna blir överhettade.
Fördelar med CAN:
- Det minskar ledningarna eftersom det är en distribuerad kontroll och detta säkerställer förbättrad systemprestanda.
- Många CAN-chipstillverkare tillhandahöll datalänkskiktet och det fysiska lagret som gränssnittet till chipet och allt som programvaruutvecklaren bara behöver göra är att utveckla applikationskodningen.
- Det ger möjlighet att arbeta i olika elektriska miljöer och säkerställer ljudfri överföring.
- Trafikstockningar elimineras eftersom meddelandena sänds utifrån deras prioritet och det tillåter hela nätverket att uppfylla tidsbegränsningarna.
- Det tillhandahåller felfri överföring eftersom varje nod kan söka efter fel under överföringen av meddelandet och skicka felramen.
CAN Arbetsexempel:
Controller Area Network har stora applikationer inom både industri och fordon. En av de viktigaste applikationerna är involverad i kommunikation mellan de olika enheterna i ett fordon. En annan kan vara bland olika mikrokontroller, antag för att detektera ett lösenord, används för att uppfylla alla krav som att öppna en låst dörr med ett lösenord eller slå på en lampa, etc.

Nätverkskrets för styrenhet
Den grundläggande applikationen består av 3 mikrokontroller som kommunicerar med varandra med två ledningar som i ett CAN-nätverk. Den 1stmikrokontroller är gränssnitt med en knappsats, 2ndmed en LCD och den tredje med en summer och ett relä som styr en lampa. När ett lösenord anges i knappsatsen, 2ndmikrokontroller fungerar som en mottagare och tar emot det sända meddelandet bit för bit från 1stsändaren och visar meddelandet på LCD-skärmen. När hela meddelandet överförs, 2ndmikrokontroller gör verifieringen och om lösenordet är fel skickar det en signal till 3rdmikrokontroller, som i sin tur skickar summer är påslagen med denna signal. När lösenordet är rätt, 3rdmikrokontroller slår på reläet som i sin tur tänder lampan.










{kind=link}
{kind=link}