
Introduktion:
Nu använder dagens många industrier robotar på grund av deras höga prestanda och tillförlitlighet och vilket är till stor hjälp för människor. Hinderundvikande robotik används för att upptäcka hinder och undvika kollision. Detta är en autonom robot. Utformningen av hinderundvikande robot kräver integrering av många sensorer enligt deras uppgift.
Hinderavkänning är det primära kravet för denna autonoma robot. Roboten får informationen från omgivningen genom monterade sensorer på roboten. Vissa avkänningsanordningar som används för att upptäcka hinder som stötsensorer, infraröda sensorer, ultraljudssensorer etc. Ultraljudsgivaren är bäst lämpad för hinderavkänning och den är till låg kostnad och har en hög kapacitet.

Hinderundvikande Robotfordon
Arbetsprincip:
Hinder undvikande robotfordon använder ultraljudssensorer för sina rörelser. En mikrokontroller med 8051 familjer används för att uppnå önskad operation. Motorerna är anslutna via IC-motorn till mikrokontrollern. Ultraljudsgivaren är fäst framför roboten.
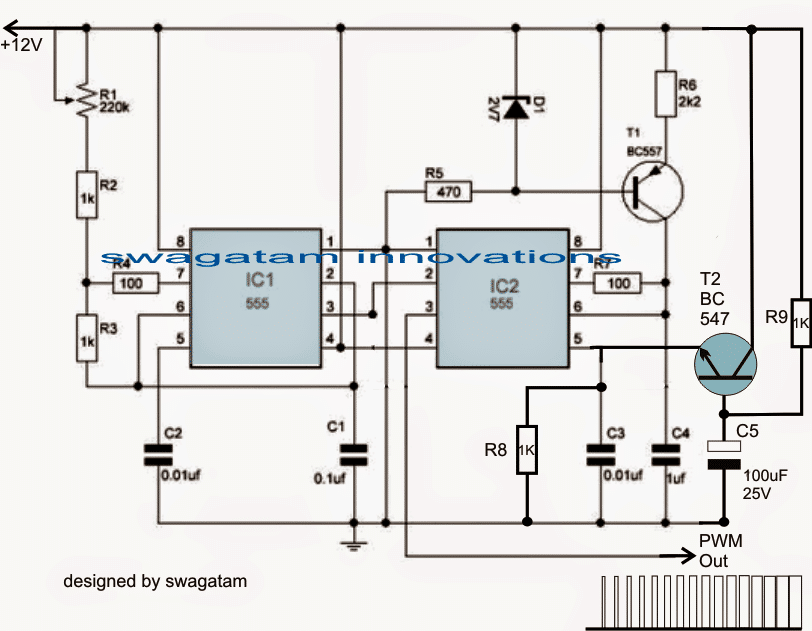
Närhelst roboten går på önskad väg överför ultraljudssensorn ultraljudsvågorna kontinuerligt från sensorhuvudet. Närhelst ett hinder kommer framför det reflekteras ultraljudsvågorna från ett objekt och den informationen skickas till mikrokontrollern. Mikrocontrollern styr motorerna till vänster, höger, bak, fram, baserat på ultraljudssignaler. För att styra hastigheten för varje motor används pulsbreddsmodulation (PWM).

Blockdiagram Hinderundvikande Robotfordon
Olika sensorer som används för att undvika hinder Robotfordon
1. Hinderavkänning (IR-sensor):
IR-sensorerna används för att upptäcka hinder. Sensorns utgångssignal skickas till mikrokontrollern. Mikrocontrollern styr fordonet (framåt / bakåt / stopp) med hjälp av likströmsmotorn som är placerad i fordonet. Om något hinder placeras inbyggt tar IR-sensorn inte emot ljusstrålarna och ger signaler till mikrokontrollern. Mikrokontrollern stoppar fordonet omedelbart och sirenen tänds. Efter en minut kommer roboten att kontrollera banstatus om ett hinder tas bort roboten rör sig långt ord annars kommer roboten tillbaka för att flytta startplatsen. Sensorn upptäcker föremål genom att avge ett kort ultraljud och sedan lyssna på miljön. Under kontroll av en värdmikrokontroller avger sensorn en kort 40 kHz explosion. Denna explosion vågar eller reser genom luften träffar en artikel och studsar sedan igen till sensorn. Sensorn tillhandahåller en utgångspuls till värden som kommer att avslutas när ekot detekteras, varför bredden av en puls till nästa tas med i beräkningen av ett program för att ge resultat på ett avstånd från objektet.
två. Sökväg (närhetssensor):
Den normala orsaken både sensorer som ger riktlinjerna och roboten följer den går rakt på vägen. När linjen slutar vid den tiden backar roboten 180 och vänder tillbaka samma plats.

Att vara online
Närhetssensorerna används för vägdetektering. När höger sensor inte detekteras i kurvlinjen aktiverar mikrokontrollen vänster motor för att svänga åt vänster tills signalen från höger sensor. När signalen detekteras rätt sensor aktiveras de två motorerna för att gå framåt. När linjen slutar vid den tiden backar roboten 180 och vänder tillbaka samma plats.

Att förlora linjen
3. Ultraljudssensor:
Ultraljudsgivaren används för detektering av hinder. Ultraljudssensorn överför ultraljudsvågorna från dess sensorhuvud och mottar åter ultraljudsvågorna som reflekteras från ett objekt.
Det finns många applikationer som använder ultraljudssensorer som instruktionslarmsystem, automatiska dörröppnare etc. Ultraljudsgivaren är mycket kompakt och har mycket höga prestanda.

Allmänt diagram för ultraljudssensor
Arbetsprincip:
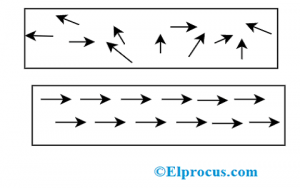
Ultraljudsgivaren avger kort och högfrekvent signal. Dessa sprids i luften med ljudets hastighet. Om de träffar något föremål reflekterar de en ekosignal till sensorn. Ultraljudsgivaren består av en multivibrator, fäst vid basen. Multivibratorn är en kombination av en resonator och en vibrator. Resonatorn levererar ultraljudsvågor som genereras av vibrationerna. Ultraljudssensorn består av två delar sändaren som producerar en 40 kHz ljudvåg och detektorn detekterar en 40 kHz ljudvåg och skickar en elektrisk signal tillbaka till mikrokontrollern.

Ultraljuds arbetsprincip
Ultraljudsgivaren gör att roboten virtuellt kan se och känna igen ett objekt, undvika hinder, mäta avstånd. Räckvidden för ultraljudssensorn är 10 cm till 30 cm.
Användning av ultraljudssensorn:
När en elektrisk puls med hög spänning appliceras på ultraljudsgivaren vibrerar den över ett specifikt frekvensspektrum och alstrar en ljudvåg. Närhelst något hinder före ultraljudssensorn reflekteras ljudvågorna i form av eko och genererar en elektrisk puls. Den beräknar tiden det tar mellan att skicka ljudvågor och ta emot ekot. Ekmönstren kommer att jämföras med mönster för ljudvågor för att bestämma den detekterade signalens tillstånd.
Notera: Ultraljudsmottagaren ska detektera signal från ultraljudssändaren medan sändningsvågorna träffar objektet. Kombinationen av dessa två sensorer gör att roboten kan upptäcka objektet i dess väg. Ultraljudssensorn är fäst framför roboten och den sensorn hjälper också roboten att navigera genom hallen i alla byggnader.
Tillämpningar av ultraljudssensor:
- Automatisk byte av trafiksignaler
- Inbrottslarmsystem
- Räkneinstrumentåtkomst växlar parkeringsmätare
- Bakre ekolod av bilar
Funktioner hos ultraljudssensor:
- Kompakt och lätt
- Hög känslighet och högt tryck
- Hög tillförlitlighet
- Effektförbrukning på 20 mA
- Puls in / ut-kommunikation
- Smal acceptansvinkel
- Ger exakta beräkningsfria beräkningsavgränsningar inom 2 cm till 3 m
- Explosionspunkt-lysdioden visar uppskattningar i framsteget
- 3-stifts header gör det enkelt att ansluta med hjälp av en servoutvecklingslänk
Tillämpningar av hinderundvikande robotfordon:
- Speciellt militära applikationer
- Den kan användas för stadskrig
Nu fick tydligt en idé om konceptet med robotfordonet med en ultraljudssensor för hinderavkänning om ytterligare fler frågor om detta ämne eller konceptet för elektriska och elektroniska projekt lämnar kommentarerna nedan.
Fotokredit:
- Allmänt diagram för ultraljudssensor av Letsmakerobots
- Arbetsprincip för ultraljudssensor av Microsonic









{kind=link}