En robot är en mekanisk eller virtuell konstgjord agent, i allmänhet en elektromekanisk maskin som styrs av ett datorprogram med hjälp av elektroniska kretsar . Robotar kan vara autonoma eller semi-autonoma och varierar från humanoider som Hondas är det avancerade steget i innovativ mobilitet och TOSY. TOSY Ping Pong Playing Robot till industrirobotar, patentassisterande robotar, medicinska driftsrobotar, hundterapirobotar, kollektivt programmerade svärmrobotar och till och med mikroskopiska nanorobots. Genom att representera ett liv som ett utseende eller automatisera rörelser kan en robot överföra en känsla av intelligens eller genom sig själv. Den här artikeln diskuterar IR-sensorbaserade trådlösa robotfordon.
Vad är ett trådlöst robotfordon?
De robot är en teknik som handlar om design, konstruktion, drift och tillämpning av robotar, liksom datorsystem, används för att kontrollera, sensorisk återkoppling och informationsbehandling kallas robotar. Denna teknik handlar om automatiserade maskiner som kan placeras av människor i farliga miljöer eller som liknar människor i utseende, beteende. Numera är robotar inspirerade av naturen som bidrar till området bioinspirerad robotik. Dessa robotar skapade också en ny gren av robotik och mjuk robotik. De mekaniska tekniker som utvecklats genom den industriella åldern, det finns mer praktiska tillämpningar som automatiserade maskiner, fjärrkontroll och trådlös fjärrkontroll.

Trådlöst robotfordon
Vad är en IR-sensor?
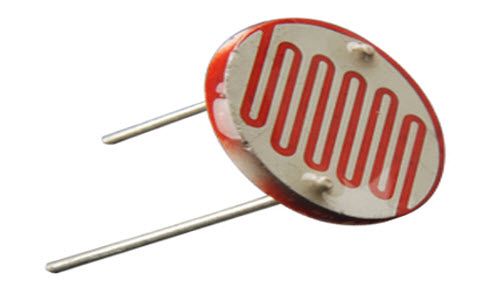
En IR-sensor är en anordning som avger för att känna av vissa aspekter av omgivningen som upptäcker IR-strålning som faller på den. Sändaren är helt enkelt en IR-LED ( Ljusdiod ) och detektorn är helt enkelt en IR-fotodiod som är känslig för IR-ljus med samma våglängd som avges av IR-lysdioden. När IR-ljus faller på fotodioden förändras motstånden och utspänningarna i proportion till storleken på det mottagna IR-ljuset. Det finns många typer av IR-sensorer som är byggda och kan byggas beroende på applikation. Kontrastsensorer (används i Linje som följer robotar ), Närhetssensorer (används i pekskärmstelefoner) och hindringssensorer (används för att räkna varor och i inbrottslarm) är några exempel.

IR-sensor
Radiofrekvens fjärrstyrd trådlös robot
Det RF-kontrollerade trådlösa robotfordonet innehåller huvudsakligen en RF-sändare och RF-mottagare.
RF-sändare
RF-moduler är vanligtvis av mycket liten storlek och arbetar inom spänningsområdet 3V till 12V. RF-sändarmoduler är endast konstruerade för att fungera med 433MHz frekvens. Om sändning logisk noll, dras ingen effekt av sändaren. För sändning är logik en, den förbrukar cirka 4,5 mA med 3V. Sändaren och mottagaren gränssnitt med 8051 mikrokontroller och få önskad operation. RF-sändare har levererat spänning i intervallet 3V till 6V och uteffekt i intervallet 4V till 12V.

RF-sändare
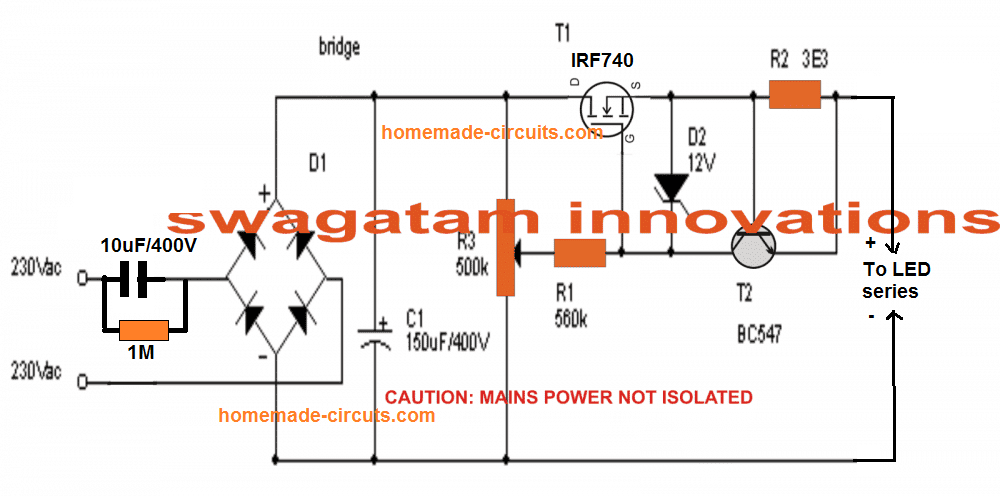
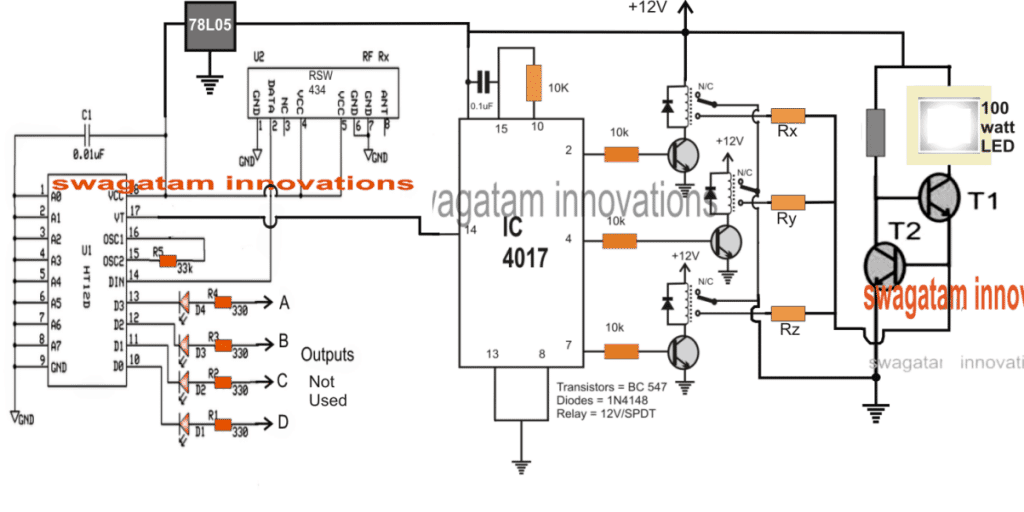
RF-sändarens kretsschema visas nedan används för att ansluta olika tryckknappar för att flytta robotfordonet i olika riktningar som framåt, bakåt, höger och vänster. Genom att trycka på lämplig tryckknapp kan vi styra robotfordonets rörelse.
RF-mottagare
RF-mottagaren är också liten och RF-mottagaren har en matningsström på 3,5 mA med en driftspänning på 5 V. RF-sändarmoduler är konstruerade för att endast fungera med 433MHz (som ska matcha sändarfrekvensen för kommunikationsändamål för att ta emot signaler från sändaren).

RF-mottagare
RF-kommunikation med hjälp av robotfordonet
Radiofrekvens (RF) består av en sändare och en mottagare, som är ansluten till en isolerad krets som ska styras. En styrsignal överförs från sändaränden i form av radiovågor eller elektromagnetiska vågor, så att fjärrstyrningen av enheten, som är ansluten till mottagaränden. Denna styrsignal överförs med hjälp av elektromagnetiska vågor eller radiovågor med radiofrekvens. Således mottas styrsignalen vid mottagaränden och få den exakta utgången, såsom ett robotfordon, specialrobot, kommunikationsändamål och så vidare.
RF-kontrollerat robotfordon
Huvudmålet med detta projekt är att designa ett robotfordon som styrs av en TV-fjärrkontroll. Här använder det föreslagna systemet RF-teknik för fjärrstyrning. En IR-sensor är ansluten till robotens styrenhet för att detektera de infraröda signalerna som sänds av fjärrkontrollen. En 8051-serie av mikrokontroller används för den föredragna operationen.
Vid sändningssektionen (TX) används tryckknappar för att skicka kommandon till mottagaränden för att styra robotens rörelse, antingen för att röra sig i fyra riktningar som framåt, höger, bakåt och vänster etc. Vid mottagningssektionen gränssnitt två motorer med 8051-familjens mikrokontroller där de används för fordonets rörelse.

IR-sensorbaserad trådlös robotfordonssats
TV-fjärrkontrollen genererar RC5-baserad data som tas emot av en infraröd mottagare som är gränssnitt med mikrokontrollern. Det inbyggda programmet i mikrokontrollern hänvisar till koden för att producera föredragen utgång baserat på i / p-data för att fungera motorerna via en IC-motorförare.
RF-sändaren fungerar som en RF-fjärrkontroll som har fördelen med gott om räckvidd (upp till 200 meter) med en lämplig antenn, medan mottagaren avkodas innan den levereras till en annan mikrokontroller till driva likströmsmotorer genom IC-motorförare för nödvändigt arbete.
Vidare kan detta projekt förbättras med DTMF-teknik . Med hjälp av RF-teknik kan vi styra roboten med en mobiltelefon. Denna teknik har en fördel jämfört med RF-teknik över långa kommunikationsomfång.
Således handlar det här om IR-sensorbaserade trådlösa robotfordon. Vi hoppas att du har fått en bättre förståelse för detta koncept. Dessutom är alla tvivel angående detta koncept eller el- och elektronikprojekt , ge din feedback i kommentarfältet nedan. Här är en fråga till dig, vad är IR-sensorns huvudfunktion?