
WSG-DSA är ett gripfinger som integrerar taktil avkänning för högupplöst profilåterkoppling under grepp. För avkänningsändamål använder den en DSA9205i intelligent taktil givare. Den passar ovanpå WSG: s basbackar och är direkt ansluten till gripkontrollen genom den integrerade sensorporten i basbackarna så att inga externa komponenter och kablar behövs för att inkludera en rörlig enhet för dina hanteringsapplikationer. Dessa typer av fingeravkännare upptäcks automatiskt och parametriseras av WSG. Tryckprofilen kan användas från insidan av gripdonet med hjälp av ett kraftfullt skriptgränssnitt. Den här artikeln diskuterar typer av taktilitet sensorer och deras funktion .
Vad är en taktil sensor?
En taktil sensor är en enhet. Den mäter den kommande informationen som svar på den fysiska interaktionen med miljön. Känslan av beröring hos människor är generellt modellerad, dvs. kutan känsla och kinestetisk känsla. Kutan beröring har förmågan att detektera stimuli som härrör från mekanisk stimulering, smärta och temperatur. Den kinestetiska beröringen tar emot sensoringångar från de receptorer som finns i muskler, senor och leder.

Taktil sensor
Typer av taktila sensorer
Det finns olika typer av känsliga sensorer som anges nedan
- Sensor för kraft / vridmoment
- Dynamisk sensor
- Termisk sensor
Kraft- / vridmomentsensor
Kraft- / vridmomentssensorer används i kombination med en taktil grupp för att ge information för kraftstyrning. Dessa typer av sensorer kan känna belastning var som helst som den distala länken till en manipulator och i begränsningar som en hudsensor. Hudsensorn ger i allmänhet mer exakt kraftmätning vid högre bandbredd. Om manipulatorns länk definieras generellt och signalpunktkontakten antas, kan kraft- / vridmomentssensorn ge informationen om kontaktläget för kraft och moment - det kallas som inneboende taktil avkänning. Bilden på momentgivaren visas nedan.

Kraft- eller vridmomentsensor
Dynamisk sensor
Dynamiska sensorer är mindre accelerometrar vid fingerremsorna eller vid skinnet på robotfingret. Den allmänna funktionen som Pacinian-kroppar hos människor och har lika stora respektive fält, så en eller två skinnaccelerometrar är tillräckliga för hela fingret. Dessa sensorer upptäcker effektivt skapande och brytande av kontakt, vibrationerna kopplade till att glida över strukturerade ytor.

Dynamisk sensor
En stressfrekvenssensor är den andra typen av dynamisk taktil sensor. Om fingertoppen glider med hastigheten på några cm / s övergripande små stötar eller gropar på en yta, blev de tillfälliga förändringarna i huden viktiga. En piezoelektrisk polymer såsom PVDF producerar en laddning som svar på skador som kan appliceras för att producera en ström, som är direkt proportionell mot förändringsområdet.
Termisk sensor
Termiska sensorer är viktiga för den mänskliga förmågan att identifiera materialet till de gjorda föremålen, men vissa används också i robotik. Den termiska avkänningen involverar detektering av termiska gradienter i huden, som motsvarar både föremålets temperatur och värmeledningsförmåga. Robotiska termiska sensorer är involverade i Peltier-korsningarna i kombination med termistorerna .

Termisk sensor
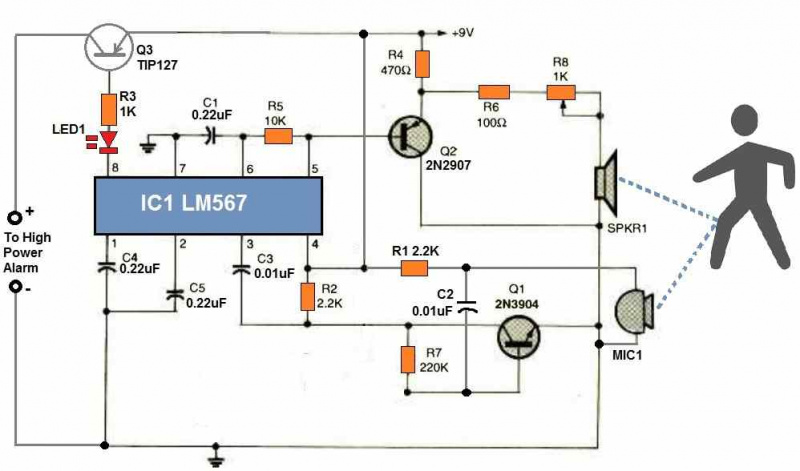
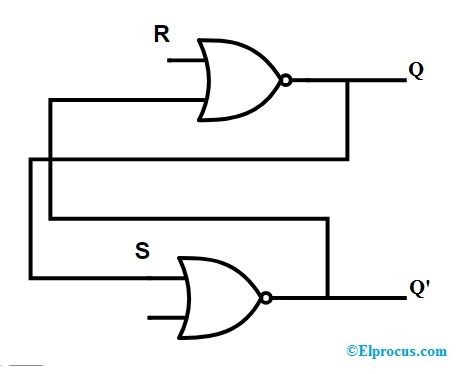
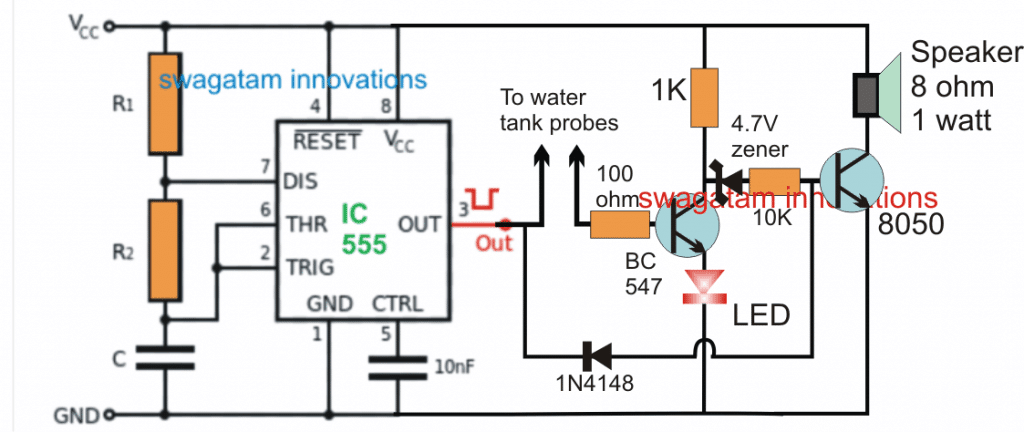
Arbetsprincip och kretsschema för den taktila sensorn
De taktila sensorerna är utvecklade för att tillhandahålla taktil avkänningsförmåga för teloperativa manipulatorer och intelligenta robotar. Taktila sensorer kan identifiera en normal kraft som appliceras på de taktila pixlarna för att fascinera kraftstyrningen och de taktila bilderna och generera objektigenkänning. För att erhålla taktila bilder och normala krafter är informationen om tangential emellertid avgörande för kraftstyrning och glidförhindrande, vilket är fascinerande för uppgiftsframgång - så krävs de tredimensionella taktila sensorerna.

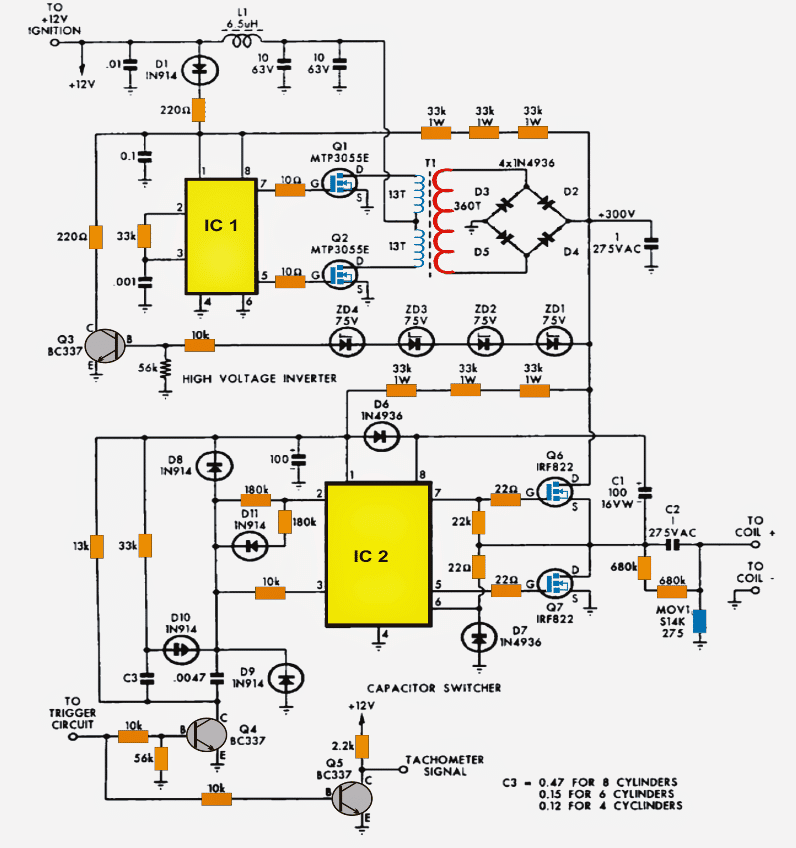
Kretsschema för taktil sensor
Det finns flera tredimensionella taktila sensorer som utvecklats med hjälp av de piezoresistiva, kapacitiva och valfria avkänningselementen och dessa taktila sensorer tillverkas av MEMS-teknik . De integrerade avkänningselementen och förbehandlingskretsarna är för kompakthet men dessa är för svaga och går lätt att bryta för de flesta applikationerna och till exempel är kraftområdet för en taktil sensor bara 0,01 N w4x och de andra taktila sensorerna är inte tillhandahålls av MEMS-tekniken. Nedanstående kretsschema visar en taktil sensorkrets.
Taktil sensor i robotik
Den taktila sensorn som används i NASA-robotarna ges nedan
- Ett av exemplen direkt relaterade till planetutforskning.
- NASA använder dessa sensorer på den internationella rymdstationen för att hjälpa människor med reparation / underhåll i miljön
- NASA har provat många taktila sensorer inom robotik som är i början. De har använt Kraftavkänningsmotstånd , och nu används kvanttunnelkompositer
- Flera belastningsknappar och celler görs för att utveckla taktila sensorer som produceras av en industriell robot
Taktila sensorapplikationer
Rör sensorapplikationer används i
- Robotik
- Datorhårdvara
- Säkerhetssystem
- Pekskärm enheter på mobiltelefonen
- Datoranvändning
Fördelar med taktil sensor
Fördelarna med den taktila sensorn ges nedan:
- De erbjuder lättanvända känsliga sensorlösningar
- Den taktila sensorn har inga externa komponenter och kablar
- Kompakt utvinning
- Verifierad taktil avkänningsteknik från robotik.
Det handlar om den taktila sensorns arbetsprincip och applikationer. Vi hoppas att den givna informationen är till hjälp för att ge god information och förståelse för projektet. Dessutom, om du har några frågor angående detta koncept på elektriska och elektroniska projekt , kan du kommentera i avsnittet nedan. Här är en fråga till dig - vilka funktioner har känsliga sensorer?
Fotokrediter:
- Taktil sensor squarespace
- Kraft- / vridmomentsensor transducertekniker
- Dynamisk sensor nonieskala
- Termisk sensor bilder-amazon







{kind=link}
{kind=link}
{kind=link}