Med utvecklingen av tekniker, särskilt inom robotteknik, är robotar dominerande i många av applikationerna. Några av dessa är av mycket riskfylld typ och farliga områden. Militära applikationer och slagfältstillämpningar ökar nu sin användning av robotar i några viktiga och komplicerade uppgifter. I en av mina artiklar har jag beskrivit användningen av robotar som en spion i militära operationer. Tänk nu om det finns ett behov av försvar av robotfordonet eller en attack från roboten? Det är där behovet av en robot inbäddad med en attackmekanism kommer. Ett sådant exempel är robotfordonet med en LASER-pistol.

RF-kontrollerat robotfordon med laserstrålarrangemang
En sådan robot används i grunden i militära operationer och även av trafikpolisen för att upptäcka hastigheten på rörliga fordon.
Innan vi går till detaljerna om robotar med laserpistoler, låt oss få en snabb förståelse av LASER som ett vapen.
En LASER-stråle (ljusförstärkning genom stimuleringsemission) är ett enriktat starkt fokuserat ljus till skillnad från det från en enkel lampa. Den består av synkroniserade tråg och toppar, dvs vågorna stör inte varandra. Detta ger ett starkt fokuserat ljus med mycket hög effekt i storleksordningen 1000 till 1 miljon gånger större än ett typiskt glödlampa. Det är en anordning som styr utsläppen och absorptionen av fotonerna genom att pumpa tillräckliga mängder energi. I detta förstärks fotonkällan till en ljusstråle. Våglängden hos dessa lasrar varieras i olika spektrum som synlig, infraröd och ultraviolett.
Principen bakom LASER kretsar kring tre saker som är absorption, spontan emission och stimulerad emission. En tillräcklig mängd energi från foton interagerar med atomen, vilket får atomen att hoppa från lägre energitillstånd till högre energitillstånd. Denna atom faller tillbaka till det lägre energitillståndet genom att avge en foton som kallas spontanemission. I stimulerad emission är frigöring av energi från atomen på artificiell väg. så interagerar foton med den exciterade atomen, har samma energi och polarisering som den infallande foton.
Låt oss nu titta på robotens hårdvarudelar
- Bas: Basen på en sådan robot kan vara vilken kubisk kaross som helst med hjul fästa för dess rörelse.
- Likströmsmotor: Roboten består av två likströmsmotorer som drivs av motorförarna och ger roboten den rörelse som krävs.
- Styrenhet: Robotens rörelse styrs med en RF-kommunikationsmodul. Sändaren består av tryckknappar, mikrokontroller, en avkodare och en RF-sändare medan mottagarenheten inbäddad i roboten består av en kodare och RF-mottagarmodul för att styra robotrörelse .
- EN LASER-pistol: En LASER-pistol är monterad på roboten som utför robotens huvuduppgift.
En smyga in i roboten som arbetar
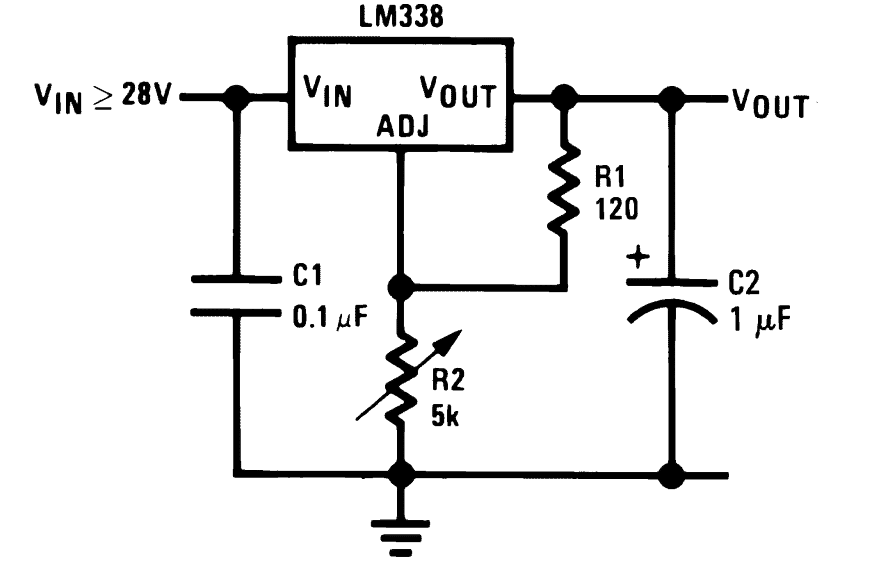
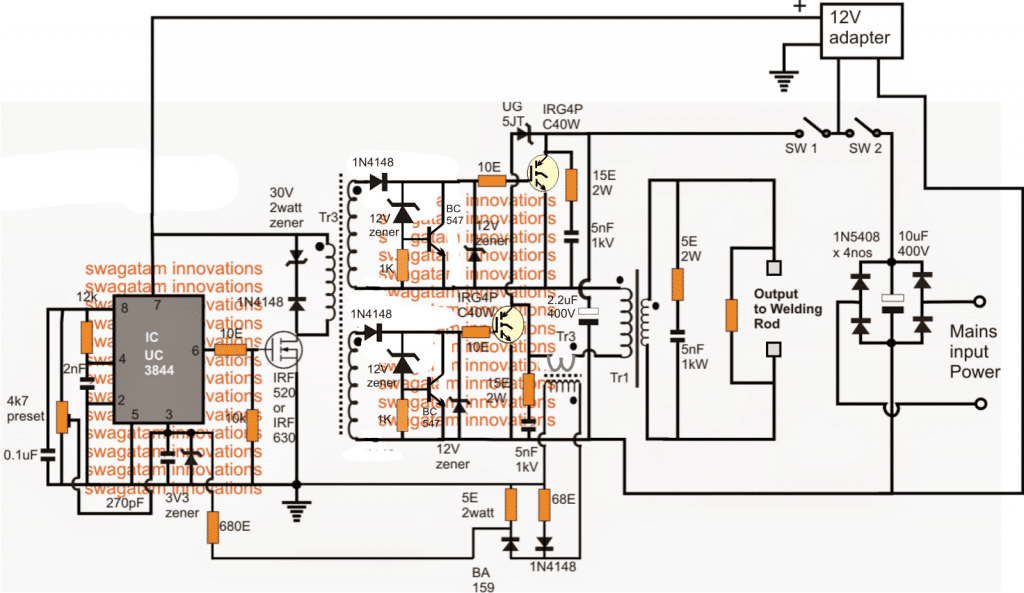
När roboten rör sig i önskad riktning skjuter en stark ljusstråle från LASER-pistolen som antingen kan skada målet eller bara skapa en plats för att upptäcka målet. LASER måste drivas av vissa energikällor. I en enkel prototypdesign med en grundläggande LASER-penna drivs enheten av en transistor som fungerar som en omkopplare. Transistorn tar emot den låga logiska signalen från mikrokontrollern och är i avstängt tillstånd, vilket gör LASER-modulen direkt ansluten till 5 V-strömförsörjningen.

Laserpistol som drivs av transistor som fungerar som en växelriktare
Styr roboten
För att kontrollera robotrörelsen måste motorns drift kontrolleras. Detta kan göras med hjälp av en RF-styrd drift av motorförarna. Kommandona sänds med hjälp av en RF-sändare på någon avståndsenhet cirka 200 meter och tas emot av RF-mottagaren för att driva motorerna.
Sändarenheten består av flera tryckknappar som fungerar som kommandor för att flytta roboten i önskad riktning. Tryckknapparna är gränssnitt med mikrokontrollern, som är programmerad att skicka data i parallell form baserat på tryckknappsingången, till kodaren. Kodaren konverterar denna parallella data till seriell form och denna seriella data överförs med hjälp av RF-sändarmodulen via en antenn.

Blockdiagram som visar sändaravsnittet
Mottagarenheten består av en RF-mottagarmodul som tar emot den modulerade signalen och demodulerar den. Avkodaren tar emot den demodulerade signalen i serieform och omvandlar den till den parallella formen. Mikrokontrollern tar emot signalerna och styr motordrivrutinen därefter. Motordrivrutinen som används i LM293D som kan styra 2 motorer åt gången.

Blockdiagram som visar mottagarsektionen
Således med hjälp av RF-kommunikation kan vi styra roboten.
I beskrivningarna ovan har jag gett en kort uppfattning om en enkel prototyp av ett robotfordon med en LASER-stråle. I verkliga applikationer används normalt långväga kommunikationssystem som GSM eller DTMF för att styra roboten från avlägsna platser.
3 tillämpningar av robotfordon med laserpistol:
- Måldetektion : Robotfordonet kan använda LASER-strålen för att orsaka en plats på målet, så att den är lätt synlig och kan riktas. Ett exempel är Air Borne LASER.
- Målförstörelse : En stark Laserstråle i storleksordningen 95 GHz frekvens kan orsaka en brännande känsla i människokroppen när den tränger igenom huden med 1/64then tum och strålenergin kan värma upp vattenmolekylerna i kroppen. Ett exempel är Active Denial System som utvecklats av USA.
- Target Range Finder och hastighetsdetektering : LASER-strålen från robotfordonet kan användas för att hitta målets räckvidd enligt principen om LASER-ljusreflektion och även målets hastighet kan beräknas när vi når räckvidden.
Så nu har vi en kort uppfattning om att robotar använde en måldetektor och förstörare. Har den något nytta för den normala allmänheten förutom bara militären? Tänk och svara.