I det här inlägget lär vi oss en bakåtriktad krets för att driva en inkubatormotormekanism med en föredragen uppsättning rörelser. Idén begärdes av Mr. Anwar
Tekniska specifikationer
Jag är från Indonesien ..... Jag behöver scheman för inkubatortimern med motor med högt vridmoment (DC-motorns strömfönster i bilen). Jag försöker få en likströmsmotor att köra i två riktningar tills den når ändläget. Stoppa sedan och byt polaritet så att den kommer att köra i andra riktningen när strömmen slås på igen. Gör sedan samma sak i andra änden.
1. timer slår på strömmen i 1 minut. (07.00 -7: 01)
2. motorn går i en riktning tills den träffar stoppläge, säg 30 sek.
3. strömmen till motorn stängs av när den träffar stoppläge och fördröjs under 1min. timer för att avsluta / stänga av huvudströmmen. vänder också polariteten så att.
4. nästa gång huvudtimern startar (10: 00-10: 01) doserar den samma sak i omvänd riktning och upprepas kontinuerligt
5. 12 VDC motor back (bara två kablar från motor + och -)
6. LED-indikator för varv / Fwd-motor
Kan du hjälpa mig Sir?
Tack på förhand för all hjälp.
Detta är ett viktigt hemprojekt som måste vara 100% pålitligt.
Designen

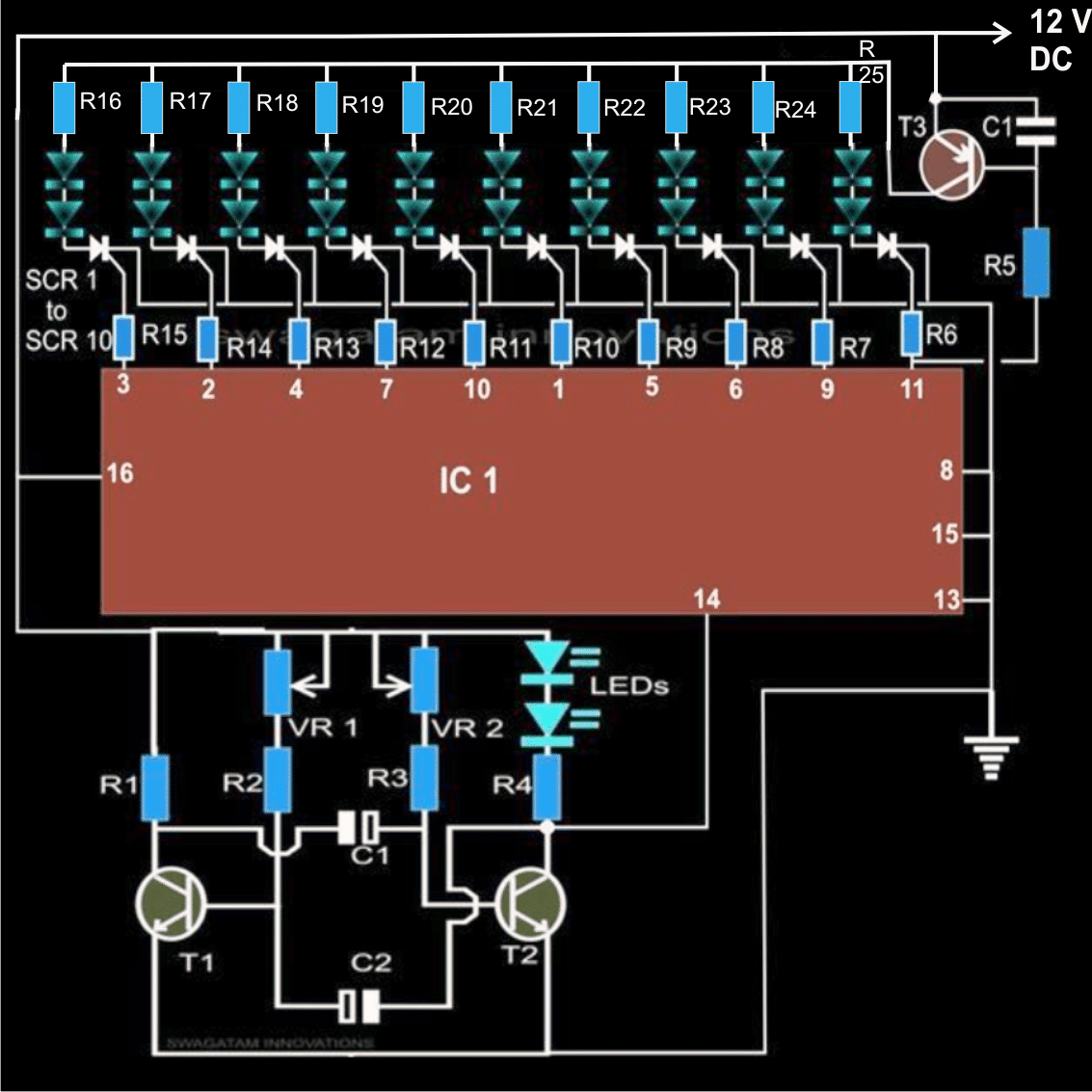
I figuren ovan kan vi visualisera en design för att implementera den föreslagna bakåtrörelsen för en inkubatormotor efter en förutbestämd tidsintervall.
Just nu när strömmen slås PÅ har vi följande scenario:
Den magnetiska omkopplaren för 'set' kan antas vara i avaktiverat tillstånd eller nedtryckt medan motorn eller den designade inkubatormekanismen är i sitt nollstartläge.
Observera att företrädesvis bör 'set' / 'reset' -omkopplarna implementeras med magnetiska reed-omkopplare.
När strömmen är PÅ, återställs IC 4060 via C2 så att den initierar räkningsprocessen från noll, och pin3 återges till nolllogik.
Denna initiala nolllogik matas via C3 till T1-basen som omedelbart leder till att tvinga T3 och dess tillhörande relä att aktiveras. R7 säkerställer att T1 / T3 låses fast i detta läge.
DPDT-reläet aktiverar vid denna tidpunkt vid dess N / O-kontakter som initierar motorn och mekanismen mot en antagen 'framåt' -rörelse.
Så snart motorn börjar röra sig släpps 'set' -knappen så att T4 och den övre SPDT får möjlighet att aktiveras, varvid SPDT-reläet uppnår en N / O-positionsväxling som gör att NDC-kontakterna för DPDT är i standby tillförsel..
Motorn och / eller mekanismen fortsätter att röra sig tills den har uppnått 'återställningsläget' som gör att T2 aktiverar och bryter T1 / T4-spärren.
När T4 är avstängt ändrar DPDT-reläet sin position från N / O till N / C och ger en motsatt (omvänd) rörelse mot motorns mekanism.
Inkubatorns motormekanism vänder nu sin riktning och initierar en omvänd rörelse tills den har nått 'inställningspunkten' som snabbt stänger av T4-basenheten, SPDT stänger av DPDT: s skärkraft och hela mekanismen står still .
Under tiden fortsätter IC 4060 att räkna tills den ännu en gång har producerat en nolllogik efter att ha gått igenom en hög logik vid sin pin3 (genom att urladda C3).
Cykeln börjar återigen och upprepar proceduren enligt ovan.
Tidigare: Blinkar en LED med Arduino - Komplett handledning Nästa: High Power Industrial Mains Surge Suppressor Explored




![Bygg en enkel Buck Converter-krets [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)