Inlägget förklarar ett enkelt hinder för att undvika robotkrets utan mikrokontroller och utan att använda speciella motorförare-kretsar eller IC. Idén begärdes av Mr. Faiyyaz
Designen
I grund och botten är det i form av en fordon i rörelse som kan upptäcka och undvika potentiella hinder på dess väg och ändra riktning på lämpligt sätt så att dess rörelse förblir oavbruten, enkel!
Operationen är således automatisk utan någon manuell eller mänsklig ingripande.
Den presenterade idén om ett hinder som undviker robot utan mikrokontroller som namnet antyder använder inte en mikrokontroller och är därför extremt enkel att bygga och passar alla nya hobbyister.
Under designen av kretsen insåg jag att för att implementera principen skulle åtminstone ett par hinder behövas sensormoduler, eftersom användning av en enda modul kan orsaka oregelbunden rörelse av motorn och kanske inte hjälper till att smidigt avleda eller vrida fordonet mot en fri väg.
Fordonsmotorn är ganska lik den fjärrkontroll leksaksbil som jag hade diskuterat i ett av de tidigare inläggen.
Följande diagram representerar en av modulerna i systemet, och därför skulle två eller ett par av sådana moduler krävas över fordonets högra och vänstra sida.
Idén är enkel och fungerar utan mikrokontroller och utan speciella IC-motorförare. Det betyder att du kan göra det utan någon typ av kodning och utan att använda någon form av komplexa motorförare IC ... och kretsen låter dig använda vilken likströmsmotor som helst oavsett dess kraft, så även högeffektiva hinder som undviker fordon kan vara tillverkas med hjälp av denna krets som vanligtvis används i köpcentra och liknande butiker.
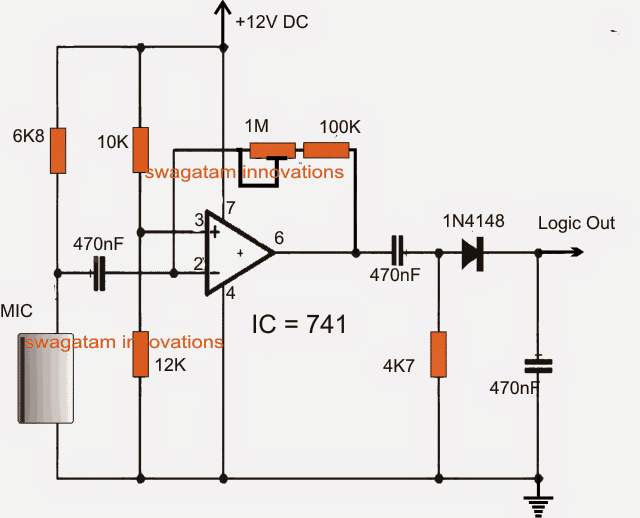
Kretsschema

Låt oss nu försöka förstå ovanstående krets med hjälp av följande förklaring:
Hur det fungerar
IC 555 är konfigurerad som en IR-sändare och är inställd på att generera en konstant 38 kHz frekvens, medan den angränsande transistoriserade kretsen är konfigurerad som mottagarsteg eller IR-sensorsteg.
Låt oss anta att det är högermodulen och antar att den här modulen råkar vara den första som upptäcker ett hinder i vägen.
Så snart ett hinder detekteras reflekteras 38 kHz-frekvensen som genereras av 555 IC mot sensorn i den angränsande mottagarkretsen.
Mottagaren aktiverar omedelbart de associerade transistorerna så att den slutliga drivtransistorn hindras från att leda.
Nu ska motorn som styrs av denna transistor vara placerad på fordonets vänstra sida, det vill säga på motsatt sida av denna modul ... på samma sätt styrs motorn på höger sida faktiskt av vänster sidomodul .
Följaktligen, när den ovan antagna hinderdetektormodulen aktiveras, stoppar den vänstra sidomotorn, medan högermotorn får röra sig normalt.
Denna situation resulterar i att fordonet tvingas ta en vänster avledning ... vilket innebär att den antagna vänstra modulen nu börjar få ännu starkare hinder och fortsätter att tvinga fordonet att fortsätta hårdare på den pågående avledningen tills den helt har undvikit hindret . Modulen slutar nu ta emot hinder och fordonet börjar röra sig normalt på sin nya väg.
Medan ovanstående avledning utförs tvingas vänstermodulen att bli mer och mer isolerad och bort från hindret så att den inte får möjlighet att störa proceduren och tillåta en ren och smidig avledning av fordonet.
Exakt samma procedurer implementeras om den vänstra sidomodulen råkar känna hindret framför högermodulen, där fordonet tvingas röra sig hårdare och hårdare mot höger sida.
Vi kan också se ett 'avaktiverande' kretssteg i modulen som är sammankopplade över de vänstra och högra modulerna. Detta steg introduceras medvetet för att säkerställa att båda modulerna aldrig aktiveras tillsammans.
Därför, till exempel om vänster sidomodul blir den första som upptäcker ett hinder, inaktiverar den omedelbart höger sidomodul och initierar avledning av fordonet till höger och vice versa.
Sensorns IC kan vara en standard TSOP17XX-serien
För mer information om ovanstående sensor IC kan du lära dig hur man ansluter TSOP1738 IC
Och motorn bör vara utrustad med växellådor så att rörelsen ursprungligen bibehålls på en kontrollerad nivå.
Hjuluppsättning
Den fullständiga installationen av vänster och höger modul och tillhörande elektriska anslutningar kan ses i figuren nedan:

Uppdatering
Lite tänkande berättar att ovanstående enkla hinder som undviker robotkrets också kan implementeras genom att använda en enda modul istället för de två.
Men en enda modul skulle tillåta fordonet att utföra en ensidig avledning varje gång det upptäcker ett hinder, därför kan systemet konfigureras antingen för att avleda medurs eller moturs beroende av vilken motor som är ansluten till kretsen för åtgärderna.
Exempeluppsättningen kan visualiseras i följande bild:

Det verkar emellertid att det finns ett problem med ovanstående inställda motor. Om fordonet stöter på ett rätvinkligt hörn på vänster sida. Detta kommer att tvinga fordonet att fortsätta röra sig moturs tills det tar en U-sväng och börjar röra sig tillbaka i samma riktning från det det startade. Detta är inte något som användaren skulle uppskatta.
Tidigare: SMD-resistorer - introduktion och arbete Nästa: Hur en accelerometer fungerar