TILL motorn är en elektrisk anordning som omvandlar elektrisk ingång till mekanisk utgång, där elektrisk ingång kan vara i ström eller spänningsform och den mekaniska utgången kan vara i vridmoment eller kraftform. Motor består av två huvuddelar, nämligen stator och rotor, där statorn är en stationär del av motorn och rotorn är en roterande del av motorn. En motor som arbetar på avstötningsprincipen är känd som en avstötningsmotor, där avstötningen sker mellan två magnetfält i antingen stator eller en rotor. Avstötningsmotor är en en fas motor.
Vad är Repulsion Motor?
Definition: En avstötningsmotor är en enfas elmotor som fungerar genom att tillhandahålla ingång AC (växelström). Huvudapplikationen för avstötningsmotor är elektriska tåg. Den startar som en avstötningsmotor och kör som en induktionsmotor, där startmomentet ska vara högt för avstötningsmotorn och mycket goda köregenskaper för induktionsmotorn.
Konstruktion av avstötningsmotor
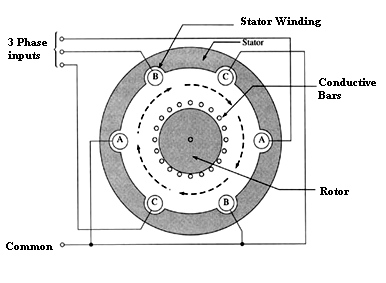
Det är en enfas växelströmsmotor som består av en polkärna som är nordpolen och sydpolen av en magnet. Konstruktionen av denna motor liknar den delade fasinduktionsmotorn och DC-serie motor. Rotorn och statorn är de två huvudkomponenterna i motorerna som är induktivt kopplade. Fältlindningen (eller en distribuerad typlindning eller statorn) liknar huvudlindningen hos den delade fasinduktionsmotorn. Därför fördelas flödet jämnt och klyftan mellan stator och rotor minskas och motviljan minskas också, vilket i sin tur förbättrar effektfaktorn.
Rotorn eller ankaret liknar likströmsmotorn som är försedd med en lindning av trumtyp ansluten till kommutatorn, där kommutatorn i sin tur är ansluten till kolborstar som är kortslutna. En borsthållarmekanism ger variabel vevaxel för att ändra borstens riktning eller inriktning längs axeln. Därför hjälper vridmomentet som produceras under denna process att kontrollera hastigheten. Energin i avstötningsmotorn överförs genom transformator eller genom induktionsverkan (där emf överförs mellan stator till rotorn).

konstruktion-av-repulsion-motor-kopia
Arbetsprincip
Repulsionsmotor fungerar på principen om repulsion där två poler av en magnet stöter bort. Arbetsprincipen för avstötningsmotor kan förklaras från 3 fall av α, beroende på magnetens läge enligt följande.
Fall (i) : När α = 900
Antag att borstar 'C och D' är inriktade vertikalt vid 90 grader och rotorn inriktad horisontellt längs d-axeln (fältaxeln) som är riktningen för strömflödet. Från principen om Lenzs lag, vi vet att emf-inducerad huvudsakligen beror på statorflödet och strömriktningen (som är baserad på borstarnas inriktning). Därför är borstens nettoeffekt från 'C till D' '0' som visas i diagrammet, vilket representeras som 'x' och '. Det finns inget strömflöde i rotorn, så Ir = 0. När ingen ström passerar i rotorn, då fungerar den som en transformator med öppet kretslopp. Därför är statorströmmen = mindre. Magnetfältets riktning är längs borstaxelns riktning, där stator- och rotorfältaxeln är 180 grader fasförskjuten, det genererade vridmomentet är '0' och den ömsesidiga induktionen som induceras i motorn är '0'.

90-gradersposition
Hus (ii) : När α = 00
Nu är borstarna 'C och D' orienterade längs d-axeln och är kortslutna. Därför är nettoeffekten som induceras i motorn mycket hög, vilket genererar flödet mellan lindningarna. Nättillverkaren kan representeras som 'x' och '.' Som visas i figuren. Det liknar en kortsluten transformator. Där statorströmmen och den ömsesidiga induktionen är maxima vilket betyder Ir = Is = maximalt. Från figuren kan vi observera att stator- och rotorfälten är 180 grader motsatta i fas, vilket innebär att det genererade vridmomentet kommer att motsätta varandra så att rotorn inte kan rotera.

α = 0 vinkel
Fall (iii): När α = 450
När borstarna 'C och D' lutar i någon vinkel (45 grader) och borstarna är kortslutna. Låt oss anta att rotorn (borstaxeln) är fixerad och statorn roteras. Statorlindningen representeras som 'Ns' antal effektiva varv och den nuvarande passeringen är 'Is', fältet som produceras av stator är i riktningen 'Is Ns' vilket är statorn MMF som visas i figuren. MMF (magnetkraft) upplöses i två komponenter (MMF1 och MMF2), där MMF1 är tillsammans med borstriktningen (Is Nf) och MMF2 är vinkelrät mot borstriktningen (Is Nt) som är transformatorriktningen och 'α 'är vinkeln mellan' Is Nt 'och' Is Nf '. Följaktligen är flödet som produceras av detta fält i två komponenter 'Is Nf' och 'Is Nt'. Den emf som induceras i rotorn producerar flöde längs q-axeln.

lutande vinkelposition
Fältet som produceras av rotorn längs borstaxeln representeras matematiskt enligt följande
Är Nt = Är Ns cos α ……… .. 1
Nt = Ns Cos α ………… 2
Nf = Ns Sin α ………… 3
Eftersom den magnetiska axeln 'T' och borstaxeln sammanfaller med rotorn MMF som är längs borstaxeln är lika med flödet som genereras av statorn.

vridmoment-härledning
Ekvationen av vridmoment ges som
Ґ α (stator d-axel MMF) * (rotor q-axel MMF) ……… .4
Ґ α (Är Ns Sin α) (Är Ns cos α) ……… ..5
Ґ α I 2s N 2s Sin α cos α [vi vet att Sin2 α = 2 Sin α cos α] ……… .6
Ґ α ½ (I 2s N 2s Sin2 α) …… .7
Ґ α K I 2s N 2s Sin2 α [När α = 0 Moment = 0 ………. .8
K = konstant värde α = π / 4 Moment = maximalt
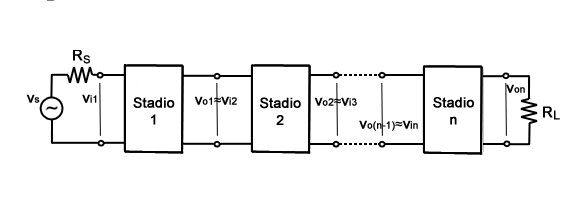
Grafisk representation
Praktiskt taget är detta ett problem, detta kan visas i ett grafiskt format, där x-axeln representeras som 'α' och y-axeln representeras som 'ström'.

grafisk representation
- Från diagrammet kan vi observera att strömmen är direkt proportionell mot α
- Det aktuella värdet är 0 när α = 900 vilket liknar transformator med öppen krets
- Strömmen är maximal när α = 00 som liknar kortslutningstransformatorn som visas i diagrammet.
- Var är är statorströmmen.
- Momentekvationen kan ges som Ґ α K I 2s N 2s Sin2 α.
- Praktiskt taget observeras att vridmomentet är maximalt om α ligger mellan 150 - 300.
Klassificering av avstötningsmotor
Det finns tre typer av avstötningsmotor de är,
Kompenserad typ
Den består av en extra lindning, nämligen kompenserande lindning, och ytterligare ett par borstar placeras mellan de (kortslutna) borstarna. Både kompenserande lindning och ett par borstar är seriekopplade för att förbättra effekt- och hastighetsfaktorerna. En kompenserad motor används där det krävs hög effekt med samma hastighet.

kompenserad typ avstötningsmotor
Repulsion Start Induktionstyp
Det börjar med avstötning av spolar och körs med induktionsprincipen, där hastigheten bibehålls konstant. Den har en enda stator och en rotor som liknar DC-ankar och en kommutator där en centrifugmekanism kortsluter kommutatorstängerna och har högre vridmoment (6 gånger) än strömmen i lasten. Funktionen för avstötning kan förstås från diagrammet, det vill säga, när frekvensen för synkron hastighet ökar, börjar procentandelen av full vridmomentbelastning att minska, där magnetpolerna vid en tidpunkt upplever en avstötande kraft och växlar till induktionsläge. Här kan vi observera belastningen som är omvänt proportionell mot hastigheten.

repulsion-start-induktion-motor-graf
Det fungerar på principen om avstötning och induktion, som består av en statorlindning, 2 rotorer som lindas (där en är ekorrbur och annan likströmslindning). Dessa lindningar är kortslutna till kommutator och två borstar. Den fungerar i ett tillstånd där lasten kan justeras och vars startmoment är 2,5-3.

avstötningstyp
Fördelar
Fördelarna är
- Startvridmomentets höga värde
- Hastigheten är inte begränsad
- Genom att justera värdet på α kan vi justera vridmomentet, där vi kan öka hastigheten baserat på justering av vridmomentet.
- Genom att justera positionsborstarna kan vi enkelt styra vridmoment och hastighet.
Nackdelar
Nackdelarna är
- Hastigheten varierar med variationen i lasten
- Effektfaktorn är mindre förutom höga hastigheter
- Kostnaden är hög
- Högt underhåll.
Applikationer
Ansökningarna är
- De används där det behövs startmoment med höghastighetsutrustning
- Spolvindar: Där vi kan justera hastigheten flexibelt och enkelt och riktningen kan också ändras genom att vända borstaxelns riktning.
- Leksaker
- Hissar etc.
Vanliga frågor
1). Vad är den vinkel som motståndsmotorn upplever avstötning?
Vid 45 graders vinkel upplever det avstötning.
2). Avstötningsmotor bygger på vilken princip?
Det bygger på avstötningsprincipen
3). Vilka är de två huvudkomponenterna i Repulsion motor?
Stator och rotor är motorns två huvudkomponenter.
4). Hur kan vridmomentet styras i avstötningsmotorn?
Momentet kan regleras genom att justera motorns primärborstar
5). Klassificering av avstötningsmotor
De klassificeras i tre typer
- Avstötningstyp
- Repulsionsstart induktionsmotor
- Kompenserad typ
Således är detta en översikt över avstötningsmotor som fungerar på avstötningsprincipen. Den har två viktiga komponenter, nämligen stator och rotor. Motorns arbetsprincip kan förstås i tre fall av vinklar (0, 90,45 grader) som är baserade på borstarnas position och de genererade fälten. Motorn upplever en avstötande effekt endast vid 45 grader. Dessa motorer används där det krävs högt startmoment. Den största fördelen är att vridmomentet kan regleras genom att justera borstarna.