En krets som tillåter en ansluten motor att arbeta medurs och moturs genom alternativa utlösare kallas en dubbelriktad styrkrets.
Den första designen nedan diskuterar en helbryggad eller H-bryggbaserad dubbelriktad motorstyrkrets med de fyra opamperna från IC LM324. I den andra artikeln lär vi oss om en dubbelriktad motorstyrkrets med högt vridmoment med hjälp av IC 556
Introduktion
Rent generellt, mekaniska brytare är vana att justera DC-motorns rotationsriktning. Justera polariteten för den använda spänningen och motorn roterar i motsatt riktning!
Å ena sidan kan detta ha nackdelen att en DPDT-omkopplare måste läggas till för att ändra spänningens polaritet, men vi har bara att göra med en omkopplare som gör proceduren ganska enkel.
DPDT kan dock ha en allvarlig fråga, det rekommenderas inte att du plötsligt inverterar spänningen över en likströmsmotor under dess rotationsrörelse. Detta kan resultera i en strömspik, som eventuellt kan brinna av tillhörande hastighetsregulator.
Dessutom kan alla slags mekaniska påfrestningar medföra liknande problem. Denna krets slår dessa komplikationer lätt. Riktningen och hastigheten manipuleras med hjälp av en ensam potentiometer. Om du vrider potten i en angiven riktning börjar motorn att rotera.
Om du vrider potten i motsatt riktning kan motorn rotera i omvänd rörelse. Mittläget på krukan stänger av motorn och ser till att motorn saktar ner först och sedan stannar innan man försöker ändra riktning.
Tekniska specifikationer
Spänning: Kretsen och motorn använder den vanliga strömförsörjningen. Detta innebär att eftersom den högsta arbetsspänningen i LM324 är 32VDC blir detta också den maximala spänningen som är tillgänglig för att driva motorn.
Nuvarande: IRFZ44 MOSFET är utformad för 49A IRF4905 kommer att kunna hantera 74A. Ändå kan kretskortspåren som går från MOSFET-stiften till skruvplint bara hantera cirka 5A. Detta kan förbättras genom lödning av koppartrådsstycken över PCB-spåren.
Se i så fall till att MOSFET-enheterna inte blir för heta - om de gör det kommer större kylflänsar att behövas för att monteras på dessa enheter.
LM324 Pinouts

BIDRETNINGSKONTROLL AV DC-MOTORER MED LM324
I grund och botten hittar du 3 sätt att justera hastigheten på likströmsmotorer :
1. Genom att använda mekaniserade växlar för att uppnå den ideala accelerationen: Detta tillvägagångssätt är ofta utöver bekvämligheten för majoriteten av entusiaster som tränar i hemverkstäder.
två. Minskar motorspänningen genom ett seriemotstånd. Detta kan verkligen vara ineffektivt (effekten kommer att försvinna i motståndet) och också resultera i minskning av vridmomentet.
Den ström som förbrukas av motorn ökar också när belastningen på motorn ökar. Ökad ström innebär ett mer spänningsfall över seriemotståndet och därmed en minskad spänning för motorn.
Motorn anstränger sig sedan för att dra ännu högre mängd ström, vilket får motorn att stanna.
3. Genom att tillföra hela matningsspänningen till motorn i korta pulser: Denna metod blir av med seriens tappande effekt. Detta kallas pulsbreddsmodulation (PWM) och är strategin som finns i denna krets. Snabba pulser gör att motorn kan arbeta långsamt förlängda pulser gör att motorn går snabbare.

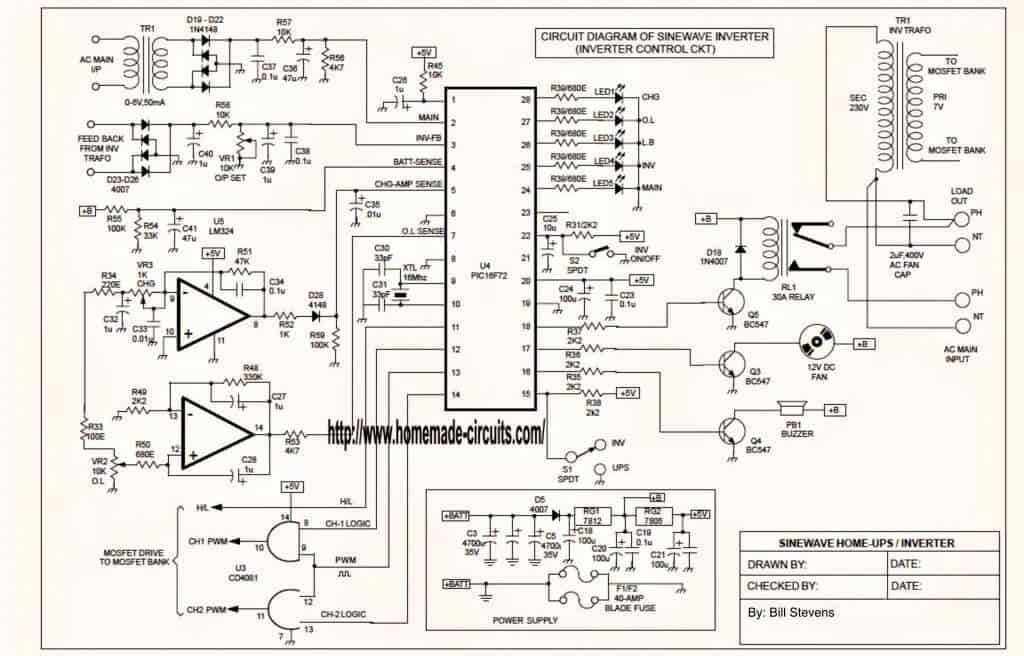
HUR DET FUNKTIONER (se schematisk)
Kretsen kan delas i fyra steg:
1. Motorstyrning - IC1: A
2. Triangelvåggenerator - IC1: B
3. Spänningskomparatorer - IC1: C och D.
4. Motordrift - Q3-6
Låt oss komma igång med motorföraren, centrerad kring MOSFETs Q3-6. Endast ett par av dessa MOSFETs är kvar i aktiverat tillstånd när som helst. Medan Q3 och Q6 är PÅ rör sig ström genom motorn och får den att rotera i en enda riktning.
Så snart Q4 och Q5 är i driftläge vänds strömcirkulationen och motorn börjar rotera i motsatt riktning. IC1: C och IC1: D hanterar vilka MOSFET: er som är påslagna.
Opamps IC1: C och IC1: D är anslutna som spänningskomparatorer. Referensspänningen för dessa opamper produceras av motståndsspänningsdelaren R6, R7 och R8.
Observera att referensspänningen för IC1: D är ansluten till '+' ingången men för IC1: C är den kopplad till '-' ingången.
Detta betyder att IC1: D aktiveras med en spänning högre än dess referens medan IC1: C uppmanas med en spänning som är lägre än dess referens. Opamp IC1: B är konfigurerad som en triangelvåggenerator och levererar aktiveringssignalen till relevanta spänningskomparatorer.
Frekvensen är ungefär den inversa av tidskonstanten för R5 och C1 - 270Hz för de använda värdena.
Minskande R5 eller C1 ökar frekvensen som ökar någon av dessa kommer att minska frekvensen. Topp-till-topp-utgångsnivån för triangelvågen är mycket mindre än skillnaden mellan de två spänningsreferenserna.
Det är därför extremt svårt för båda jämförarna att aktiveras samtidigt. Annars skulle alla 4 MOSFET: erna börja leda, leda till en kortslutning och förstöra dem alla.
Triangelns vågform är strukturerad kring en likströmsförskjutningsspänning. Ökning eller minskning av förskjutningsspänningen varierar pulspositionen för triangelvågen på lämpligt sätt.
Genom att vrida triangelns våg uppåt kan komparatorn IC1: D aktiveras om den minskar resulterar i att komparatorn IC1: C aktiveras. När spänningsnivån för triangelvågen är mitt i de två spänningsreferenserna induceras ingen av komparatorerna. DC-offset-spänningen regleras av potentiometern P1 via IC1: A, som är utformad som en spänningsföljare.
Detta ger en spänningskälla med låg utgångsimpedans, vilket gör att DC-förskjutningsspänningen blir mindre sårbar för belastningen av IC1: B.
När ”potten” byts börjar DC-förskjutningsspänningen att variera, antingen uppåt eller nedåt baserat på riktningen som potten vänds. Diod D3 presenterar omvänd polaritetsskydd för styrenheten.
Motstånd R15 och kondensator C2 är ett enkelt lågpassfilter. Detta är avsett att rengöra spänningspinnar som orsakas av MOSFET: erna när de slår på strömmen till motorn.
Dellista

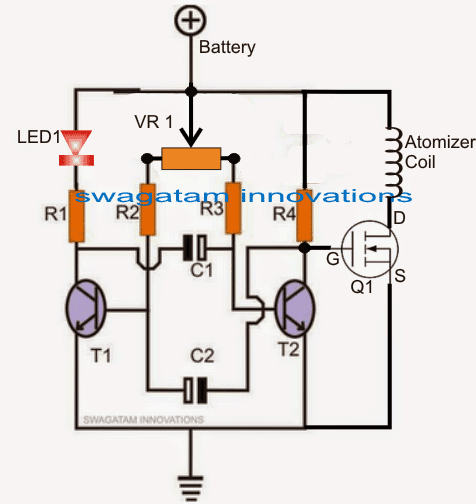
2) Dubbelriktad motorstyrning med hjälp av IC 556
Hastighets- och dubbelriktningskontrollen för likströmsmotorer är relativt enkel att implementera. För oberoende energimotorer är hastigheten i princip en linjär funktion av matningsspänningen. Motorer med permanentmagnet är en underkategori av oberoende energimotorer, och de används ofta i leksaker och modeller.
I denna krets varieras motorns matningsspänning med hjälp av pulsbreddsmodulering (PWM) vilket säkerställer god effektivitet samt ett relativt högt vridmoment vid låga motorhastigheter. En enda styrspänning mellan 0 och +10 V gör att motorhastigheten kan reverseras och varieras från inget till maximalt i båda riktningarna.
Astabel multivibrator IC är inställd som en 80 Hz oscillator och bestämmer frekvensen för PWM-signalen. Nuvarande källa T1 laddar Ca. Sågtandsspänningen över denna kondensator jämförs med styrspänningen i 1C2, som matar ut PWM-signalen till buffert N1-Na eller NPN1. Den darlingtonbaserade motorföraren är en bryggkrets som kan driva laster upp till 4 ampere, förutsatt att inkörningsströmmen förblir under 5 ampere och tillräcklig kylning tillhandahålls för effekttransistorerna T1-Ts. Dioderna D1, D5 ger skydd mot induktiva stötar från motorn Strömställaren S1 gör det möjligt att vända motorriktningen direkt.

Prototypbilder



Tidigare: Förstå förstärkarkretsar Nästa: Hur man ansluter transistorer (BJT) och MOSFET med Arduino