Den elektromekaniska anordningen eller maskinen som används för olika ändamål och styrs och drivs med hjälp av programmeringstekniker kallas som en robot. Robotarna är olika typer baserat på deras applikationer som industriella robotar , militära robotar, rymdrobotar, inhemska robotar, gångrobotar, klättringsrobotar och så vidare. Den mest avancerade robotikprojekt utvecklas för effektiv användning inom olika områden för flera applikationer. Låt oss i den här artikeln diskutera en speciell typ av robotikprojekt, nämligen linjeföljande robotfordon med gång- och klättringsmekanism.
Robotfordon

Robotprojekt för ingenjörsstudenter
De robotfordon är speciella typer av maskiner konstruerade för att röra sig på marken, i luften, under vattnet och i rymden autonomt utan en människa ombord. Dessa robotfordon styrs och drivs av olika sensorer baserade styrsystem. Robotfordonen är speciellt konstruerade för användning under förhållanden där människor inte kan komma in, t.ex. brandolyckor, mycket höga eller mycket låga temperaturer osv.,.
Line Follower Robot

Line Follower Robot
Robotfordonet som rör sig genom att följa en specifik väg eller linje kan benämnas a linjeföljande robot . Dessa linjeföljande robotar används speciellt i industriella applikationer för speciella ändamål som att transportera olika delar eller maskiner eller fordon (bilar, cyklar etc.) genom att följa den specifika linjen från en punkt (genereringsenhet) till en annan punkt (monteringsenhet) .
Den normala linjen som följer ett robotfordon med specialfunktioner som gång- och klättringsmekanism är en av intressanta robotikprojekt för ingenjörsstudenter , som kan användas för flera applikationer. Enkla steg för att designa en linjeföljande robot med gång- och klättringsmekanism visas nedan.
Steg 1: Samla in nödvändiga komponenter

Elektriska och elektroniska komponenter
Komponenterna som krävs för designlinjen som följer ett robotfordon med gång- och klättringsmekanism beräknas baserat på robotapplikation. Samla alla elektriska och elektroniska komponenter som motstånd, kondensatorer, IR-sändare, likströmsmotorer, transistorer, robotkroppar och fotodioder med lämplig klassificering tillsammans med andra delar som kartong, bultar, muttrar, aluminiumremsor etc. enligt behov.
Steg 2: Analysera kretsen för Line Follower Robot

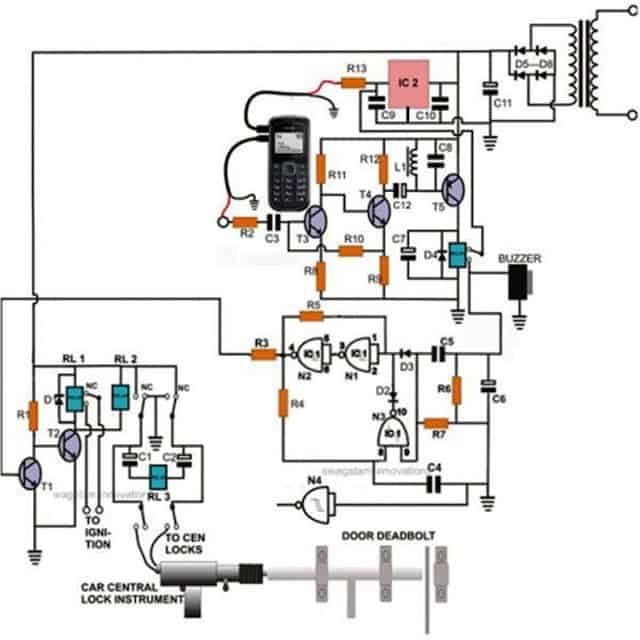
Linje efter robotfordon som kan utökas till att gå och klättra robotblockdiagram
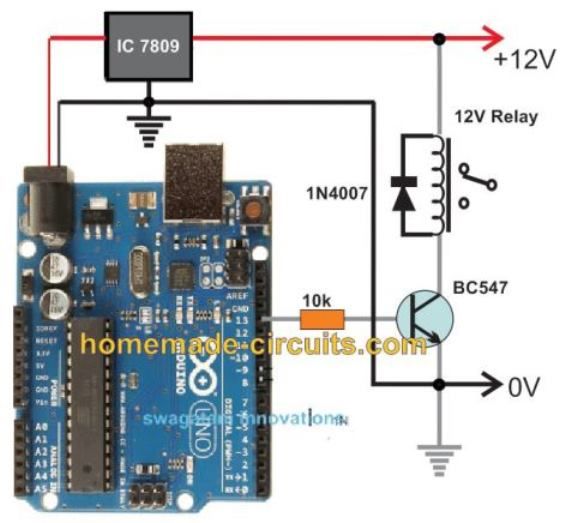
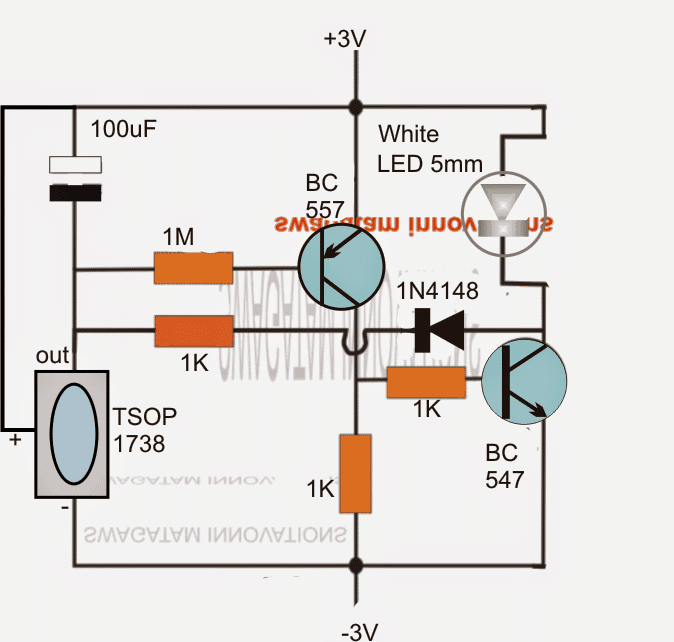
Utforma främst ett blockschema över projektkretsar med olika block som t.ex. strömförsörjningsblock , IR LED & fotodiodblock och så vidare. Efter att ha samlat in komponenter analyserar du kretskonstruktionen baserat på hur olika komponenter används. Placera sedan komponenterna över ett lödfritt brädbräda enligt kretsschemat med anslutningskablar för att testa kretsarbetet innan kretsen monteras på kretskortet. Genom att testa kretsen över lödfritt brädbräda om några ändringar krävs i kretsen eller klassificeringen av komponenterna, kan alterneringar göras enkelt utan att slösa bort pengar och tid för att byta ut komponenter eller för att ändra kretsdesign.
Steg 3: Montering och lödning av komponenter

Linje efter robotfordon som kan utökas till att gå och klättra robotprojekt
Efter att ha analyserat kretsdesignen monterar du komponenterna enligt kretsschemat över kretskortet. Löd sedan kretsen med lödpistol och lödtråd genom att följa riktiga lödriktlinjer. Anslut alla delar av roboten ordentligt för att bilda en linjeföljande robot som visas i bilden ovan och limma delarna av robotfordonet, om det behövs.
Steg 4: Arbeta med Line Follower Robot
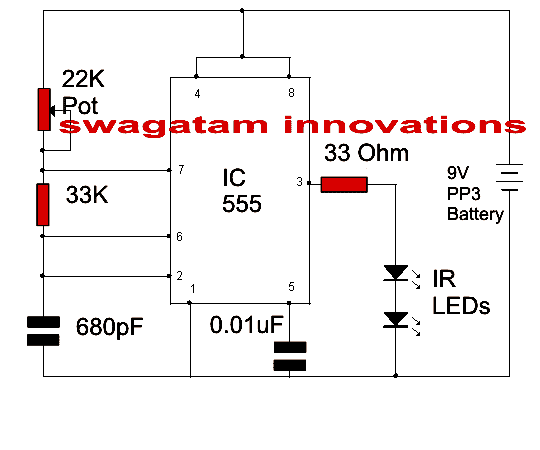
IR-sändaren och fotodioden används som en fotosensor par som kan användas för att detektera den angivna vägen för rörelse av linjeföljande robot när du går och klättrar på väggar. Fotosensorparet ger lämpliga signaler för att växla transistorerna för att driva motorerna i linjeföljroboten.
Steg 5: Linjeföljande robotfordon med gång- och klättringsmekanism
Det finns många robotprojekt för ingenjörsstudenter där linjeföljare robotfordon med gång- och klättringsmekanism är ett innovativt och intressant projekt att designa på egen hand genom att använda vår gratis e-bok för att designa elektronikprojekt.
De tillämpning av robotik ökar snabbt i vårt dagliga liv för flera funktioner som industriella applikationer - flytta eller lyfta tunga produkter, transporterar inom ett begränsat område genom att följa specifik väg, bearbetning, svetsning, hushållsapparater, autonoma robotar, militära robotar för att minska mänskliga involvering & fara, samarbetsrobotar för interaktion med människor så att för att utföra flera uppgifter, pedagogiska robotar, mobila robotar och humanoider.
Är du intresserad av att designa elektronikprojekt själv? Vet du hur man utvecklar humanoidrobotar? Om du vill veta mer om robotikprojekt för ingenjörsstudenter kan du skicka dina frågor, kommentarer, idéer och förslag i kommentarfältet nedan för teknisk hjälp.