
Vid beräkning kan CAN-gränssnittet vara en delad gräns över de två separata delarna av en systemkonversationsinformation. Konversationen kan ske mellan datorhårdvara, programvara, människor, kringutrustning och kombinationer av dessa. Vissa maskinvaruenheter på en dator som en pekskärm på grund av en pekskärm kan dela och ta emot information genom gränssnittet, medan andra enheter som en mikrofon, mus är bara ett sätt. Gränssnitt finns huvudsakligen i två typer såsom hårdvarugränssnitt och mjukvarugränssnitt. Hårdvarugränssnitt används i många av enheterna som ingång, utdataenheter, bussar och lagringsenheter. Detta CAN-gränssnitt kan definieras av logiska signaler. Ett mjukvarugränssnitt kan finnas tillgängligt i ett brett spektrum på olika nivåer. Ett operativsystem kan gränssnitt med olika delar av hårdvaran. Program eller applikationer på OS kan behöva kommunicera genom strömmar och i objektorienterad programmering måste objekt i alla applikationer kommunicera genom metoder.

KAN BUSS
CAN-bussen utvecklades 1983 hos Robert Bosch GmbH. Detta protokoll släpptes 1986 vid SAE-kongressen (Society of Automobile Engineers) i Detroit, Michigan. Den första CAN-protokoll tillverkades av Philips och Intel och släpptes på marknaden år 1987. Men BMW-serien-8 var det första fordonet som hade ett CAN-protokollbaserat multiplex ledningssystem.

KAN BUSS
Den fullständiga formen av CAN är ett styrenhetsnätverk . Det är en typ av fordonbussar som huvudsakligen är utformade för att tillåta olika enheter och mikrokontroller att interagera med varandra utan värddator. Detta protokoll är baserat på ett meddelande och huvudsakligen utformat för elektriska ledningar i bilar. Bosch publicerade olika versioner av CAN och år 1991 publicerades den senaste CAN 2.0.
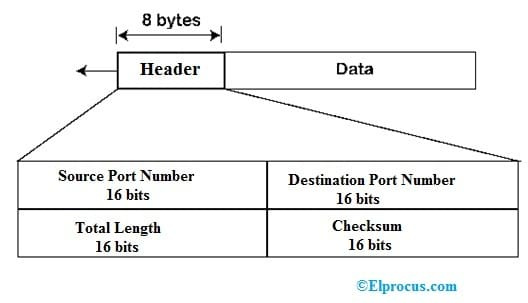
CAN består av två delar, huvudsakligen som del A och del B, där del A är en 11-bitars identifierare och är i standardformat. Del B är en 29-bitars identifierare och är i utökat format. En CAN som använder 11-bitars identifierare kallas AN 2.0A och en CAN som använder 29-bitars identifierare kallas CAN 2.0B
Gränssnitt mellan CAN och USB
Gränssnitt mellan CAN och USB är en enkel enhet som används för att övervaka CAN-bussen. Enheten använder NUC140LC1CN 32 K Cortexes-M0 mikroprocessor. Den har både CAN- och USB-kringutrustning.
De viktigaste funktionerna i gränssnittet CAN till USB är
- Det är väldigt enkelt att designa
- Väl matchad med protokollet LAWICEL CANUSB
- Exponera sig som en enhet som FTDI USB
- Den stöder CAN 2.0B 29-bitars och CAN 2.0A 11-bitars ramar
- Den består av en intern meddelandebuffert (FIFO CAN)
- Den drivs från USB-porten
- För firmwareuppdateringar används en masslagringsenhet (Flash-resident USB)
Schematisk bild
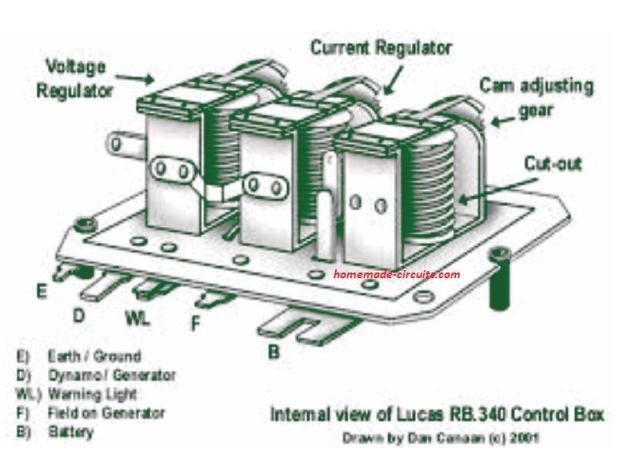
Kretskonfigurationen för gränssnittet mellan CAN och USB visas nedan. En CAN-transformator används för att möjliggöra för NUC140 CAN-enheten att interagera med CAN-bussen. Chipet TJA1051T löser syftet från NXP. Mikroprocessorn NUC140 kan arbeta med en 5V strömförsörjning. Det behövs ingen extra 3,3V spänningsregulator. Detta praktiska arrangemang gör en enkel uppgift att implementera CAN till USB-gränssnitt.

Schematisk bild
Kretsen är byggd med tre status-lysdioder, nämligen D1, D2 och D3.
- Här säger D1-diodens status att USB är ansluten till värden
- Här säger D2-diodens status att CAN-bussens aktivitet
- Felen i CAN-bussen kan indikeras med D3-diod
NUC140-mikroprocessorn har inte en integrerad startladdare och det bästa sättet att programmera används endast Nuvoton ICP-programmerare och ÄRM SWD-gränssnitt (Serial Wire Debug). Om startladdaren tidigare har dumpats med ett program kan den utlösas. Om du ansluter JP1 innan du slår på gränssnittet startas startladdaren.
Boot Loader
Flashminnet i NUC140LC1-mikroprocessorn är uppdelad i två sektioner. De kör användarprogramkod och startladdare. Storleken på startladdaren och det körande användarprogrammet är 4K och 32K. Här används masslagringsenheten (MSD) boot loader från Nuvoton för att bygga en fullt fungerande USB-boot loader. Startlastaren aktiveras genom att ansluta en JP1-bygel. Så slutligen måste en flyttbar enhet vara synlig i värdfilsystemet med en 32KB-storlek. Kopiera och klistra in uppdateringen av firmware från CAN till USB till startladdarenheten. Koppla bort USB-kabeln, koppla bort bygeln och anslut den igen. Uppdateringen av ny firmware ska nu köras.

Boot Loader
Programmering av CAN till USB-gränssnitt och NuTiny-SDK-140
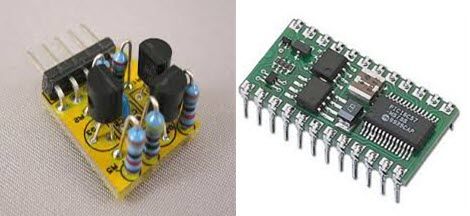
Programmering av mikroprocessor NUC140 behöver Nuvoton ICP-programmeringsapplikation och Nuvotons Nu-Link-programmerare. Men här finns NuTiny-SDK-140 (NUC140 demo-kort) från Digi-Key. Den består av två delar som Nu-Link-programmerare och delen med NUC140-chip. Detta bräde är till och med perforerat för att separera delen av Nu-Link. Egentligen kan du utforma den här enheten exklusivt runt NUC140-demo-kortet, det enda extra CAN-sändtagarchipet kommer att vara viktigt.

NUC140 styrelse
Således handlar det här om CAN-gränssnitt med USB inkluderar, CAN-buss, gränssnitt CAN till USB, schematiskt diagram, startlastare och NUC140 mikroprocessor. Vi hoppas att du har fått en bättre förståelse för detta koncept. Vidare kan alla frågor angående den här artikeln ge dina värdefulla förslag genom att kommentera i kommentarfältet nedan. Här är en fråga till dig, vilka tillämpningar har CAN-gränssnittet?
Fotokrediter:
- CAN till USB-gränssnitt saelig
- KAN BUSS canbuskit
- NUC140 instruktioner



![Glittrande LED-blomsterkrets [Mångfärgad LED-ljuseffekt]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)



{kind=link}
{kind=link}
{kind=link}